Идентификация угля или руды в режиме реального времени с помощью датчиков на экскаваторе
Идентификация руд в карьере в режиме реального времени представляет собой значительную ценную возможность для горнодобывающей промышленности. Гиперспектральные системы визуализации предлагаются в качестве технологии, позволяющей достичь этой характеристики в реальном времени. В этой статье рассматривается применение гиперспектральной камеры, установленной на экскаваторе. Мы определяем требования к производительности для такой камеры и связанных с ней подсистем во время типичного цикла копания-погрузки. Относительно высокая скорость вращения экскаватора требует приблизительно времени экспозиции видеочастоты для достижения хорошего пространственного разрешения. Мы анализируем выборку компонентов в соответствии с требованиями и обнаруживаем, что подходящие коммерческие спектрометры, детекторы и оптика кажутся подходящими для этой цели. Также доступны автоматизированные системы спектральной классификации в реальном времени, с относительно скромными требованиями к вычислительной мощности. В статье утверждается, что при близком к пиковому солнечному освещению система для полевого развертывания с требуемой чувствительностью является жизнеспособной с использованием только коммерческих готовых компонентов.
Получение высокоточной информации о содержании/качестве руды как в режиме реального времени, так и в условиях добычи является преимуществом в горнодобывающей промышленности. Точность этой информации имеет важное значение для эффективного и финансово оптимального результата горнодобывающей промышленности; чем точнее эта информация в режиме реального времени, тем больше преимущество для горнодобывающей промышленности. Более того, возможность получения точной геологической информации в режиме реального времени имеет важное значение для обеспечения будущих автономных приложений для добычи.
Текущие подходы к получению этой геологической информации являются трудоемкими, подвержены человеческим ошибкам и изначально неточны из-за ограниченного пространственного, временного и спектрального разрешения взятых образцов. Ни одна из существующих систем не обеспечивает средства объединения всей необходимой информации в режиме реального времени для предоставления живых карт шахт, обновленных моделей и оповещений для поддержки принятия решений.
Гиперспектральная съемка (HSI) позволяет получать полный непрерывный спектр для каждой точки на двумерном изображении поверхности (Goetz, 2009). При достаточно высоком спектральном разрешении для измерения спектральных характеристик, связанных с материалами, присутствующими на поверхности, спектры могут использоваться для идентификации и различения этих материалов друг от друга. В горнодобывающих приложениях это позволяет построить карту распределения минералов, и HSI имеет потенциал для создания таких карт для больших площадей с высоким пространственным разрешением и в реальном времени.
Обычно гиперспектральная система устанавливается на подвижной платформе, например, на самолете, при этом сканирование строится по мере перемещения платформы по целевой области. Идентификация минералов с использованием HSI использовалась таким образом в течение некоторого времени (Goetz, 2009), особенно для дистанционного зондирования и геологической разведки. Во время движения платформы камера сканирует поверхность, создавая двухмерное пространственное изображение с полным спектром для каждого пространственного пикселя, в результате чего получается трехмерный куб данных (Goetz, Curtiss and Shiley, 2009).
Спектральные характеристики
В этом разделе представлен краткий обзор отражательной спектроскопии, относящейся к HSI для горнодобывающей промышленности. Когда материал освещается светом, количество поглощенного света будет меняться в зависимости от атомной и молекулярной структуры материала. Излучение с большей вероятностью поглощается на длинах волн, где энергия фотонов соответствует уровню энергии между двумя квантово-механическими состояниями составляющих атомов или молекул. Предпочтительное поглощение фотонов при данной энергии приводит к появлению линии поглощения. Для минералов длина волны и относительное количество поглощения зависят от электронной, молекулярной и кристаллической структуры материала, а также от температуры и электромагнитного поля. Количество присутствующего материала изменяет форму спектра, расширяя и углубляя спектральную линию поглощения в функцию поглощения.
Упрощенная схема полевого отражательного спектрометра показана на рисунке 1. Отраженный от цели свет записывается передней камерой спектрометра. Передняя камера фокусирует свет от цели на щель спектрометра. Затем спектрометр рассеивает свет в спектр, обычно с помощью дифракционной решетки. Длины волн всегда рассеиваются ортогонально щели. В выборочном спектрометре 1D-детектор измеряет интенсивность на каждой длине волны; спектр измеряется только для одной пространственной точки. В визуализирующем спектрометре 2D-детектор получает спектр для каждого пространственного пикселя вдоль измерения в направлении щели. В HSI механическое сканирование поверхности создает куб данных, состоящий из спектра для каждого пространственного пикселя в двумерном массиве, представляющем эту поверхность.
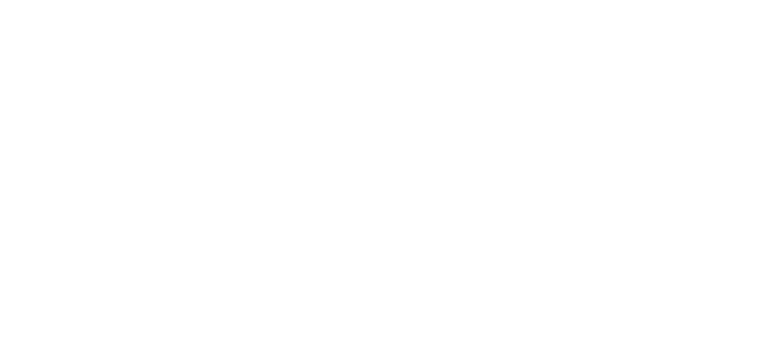
ФИГ. 1– Основные компоненты спектрометра, используемого в горнодобывающей промышленности. A – Представляет источник освещения, обычно Солнце, как в данном случае;
B — состоит из материальной цели, представляющей интерес; C — представляет собой системную переднюю оптику; D — представляет собой системный спектрометр/датчик; E — представляет собой базовый пример других источников, которые, возможно, необходимо объединить с полученными спектральными данными, такими как ЛИДАР (обнаружение и измерение дальности света); F — представляет собой локальное или удаленное вычислительное оборудование для обработки и передачи данных.
Обычно видимая/инфракрасная (ИК) спектроскопия не подходит для анализа неорганических материалов. Однако для породообразующих минералов спектральные характеристики, связанные с такими материалами, как гидроксилы, вода, карбонаты, бораты и сульфаты, позволяют проводить анализ на этих длинах волн (Fraser et al, 2006; Hunt, 1977; Hunt and Ashley, 1979; Goetz, Curtiss and Shiley, 2009). Каждый отдельный тип этих материалов будет иметь отличительные спектральные характеристики, которые позволяют легко отличать их друг от друга. По мере увеличения концентрации минерала в руде поглощается больше фотонов на заданных длинах волн, что влияет на размер или форму поглощающей характеристики. Характеристики поглощения, например глубина, ширина или крутизна краев, можно использовать для легкого определения количества данного присутствующего материала, что позволяет провести характеристику руды.
Металлические минералы обычно имеют линии поглощения, расположенные в видимом и ближнем ИК-диапазонах (VNIR). Для переходных элементов, например, Ni, Cr, CO, Cu, Fe и т. д., уровни энергии различаются для разных кристаллических структур (Clark, 1999). В результате минералы с разными структурами можно отличить друг от друга, даже если присутствуют одни и те же элементы. Разница в этих уровнях энергии соответствует фотонам в пределах VNIR. Поэтому конкретные минералы можно идентифицировать исключительно по их спектрам отражения VNIR (Goetz, Curtiss and Shiley, 2009).
Железо является наиболее распространенным из переходных элементов. Спектральные свойства железных руд были тщательно изучены (Cudahy и Ramanaidou, 1997; Thangavelu, Shanmugam и Bhattacharya, 2011; Magendran и Sanjeevi, 2011), включая сортировку руды и картирование с помощью гиперспектральной визуализации и тестовых измерений в забоях шахт (Fraser и др.,
2006; Шнайдер и др., 2009, 2011, 2012; Раманаиду и Уэллс, 2011; Мерфи, Монтейру и Шнайдер, 2012; Мерфи и Монтейру, 2013).
Другие металлические руды, представляющие коммерческий интерес, Pt/Pd (Bolin и Moon, 2003; Gallie и др., 2002), Ni (Fraser и др., 2006; Maquet, Cervelle и Gouet, 1981), Zn/Pb (McConachy и др., 2007) и редкоземельные элементы (РЗЭ) (Hauff, 2013; Chandrasekar, Mujabar и Rajamanickam, 2011) имеют спектральные характеристики в диапазоне VNIR, которые использовались для надежного прогнозирования их содержания. VNIR HSI использовался в коммерческой системе на основе конвейера в реальном времени (Tomra Sorting, 2012) для отделения дробленой руды Zn от отходов (Robben и др., 2010).
Большинство характеристик поглощения для минералов изменений, например, глины, слюды, сульфаты, карбонаты и хлориты, расположены в диапазоне SWIR (Hauff, 2013). Обычно они имеют очень мало характеристик в VNIR. В результате их часто можно легко отличить от металлических руд. При выемке и переработке полезных ископаемых основным применением спектральной идентификации материалов изменений было различение минеральной руды от отходов. Коммерчески доступная система над конвейерной лентой, использующая видимую/ИК-спектроскопию, использовалась для различения различных типов глин в измельченной медной руде перед кучным выщелачиванием (Goetz et al, 2009).
Уровень развития
Одним из недавно предложенных решений для характеристики полевой руды является метод, который измеряет характеристики материала изнутри ковша лопаты (Bamber et al, 2016), используя различные типы датчиков, включая фотометрические и электромагнитные. Эта система предназначена для определения места назначения обработки для материала, находящегося внутри каждого ковша. Хотя этот подход предлагает некоторую потенциальную ценность, он, по-видимому, не может согласовать показания «в ковше» с базовой геологической моделью с высокой степенью точности.
В дополнение к сенсорной технологии предлагается метод, который оценивает свойства объема материала. Одним из применений этого метода является обновление оценки концентрации железа в блоке шахты с использованием измерений поверхности этого блока (Robinson, Melkumyan and Chlingaryan, 2016), включая гиперспектральные данные. Однако этот метод не использует обработку в реальном времени, и ценностное предложение концепции ограничено без обновления блочной модели шахты в реальном времени.
Системы картирования железа и угля, обсуждавшиеся в предыдущем разделе, были основаны на лабораторном испытательном оборудовании, установленном на штативах. Две системы, которые отделяли руду от отходов, были установлены на фиксированном положении над конвейерной лентой. Был описан компактный гиперспектральный датчик, предназначенный для работы в суровых условиях (Murphy et al, 2016), который включает метод захвата и обработки вертикального линейного изображения горизонтального сканирования со специально созданной вращающейся платформы. Хотя работа Murphy et al (2016) предлагает определенный прогресс в этой области, система HSI, которая предназначена для установки непосредственно на уже существующее горнодобывающее оборудование и предоставления данных во время выемки грунта, еще не разработана.
Алгоритмы обработки гиперспектральных данных в реальном времени теперь существуют и могут использоваться для поддержки полевых приложений (Chang, 2016). Однако многие из этих алгоритмов были протестированы только в контролируемых экспериментах с использованием синтетических кубов данных. Таким образом, по-прежнему требуются значительные исследовательские усилия для создания набора алгоритмов, специфичных для горнодобывающей промышленности, для полевого развертывания. В частности, для характеристики наземной руды в горнодобывающей промышленности было протестировано только ограниченное количество алгоритмов. Автоматические методы обнаружения были протестированы для 14 типов минералов в SWIR, но только для очень ограниченных наборов данных (Brossard, Marion and Carrére, 2016).
Хотя в отрасли и был достигнут определенный прогресс, ни одна из предшествующих разработок не смогла предоставить полный метод и систему для высокоточного моделирования в реальном времени и поддержки принятия решений. Целью данного исследования является преодоление по крайней мере некоторых недостатков предшествующего уровня техники.
Цели
Долгосрочной целью данного исследования является разработка и внедрение развертываемой в полевых условиях системы HSI, устанавливаемой непосредственно на экскаватор для добычи руды, которая обеспечивает объединение информации в режиме реального времени для характеристики руды во время самого процесса выемки.
Такая система могла бы иметь несколько применений в горнодобывающей промышленности (Fraser et al, 2006), включая разработку высокоточной модели распределения руды. Затем эта высокоточная модель может быть использована для поддержки принятия решений по краткосрочной оптимизации шахты или перерабатывающего завода. Такая система могла бы предложить ключевые преимущества по сравнению с другими технологическими вариантами, т. е. ее можно применять пассивно, она неинвазивна и может безопасно применяться в горнодобывающей среде.
Представленное здесь исследование рассматривает только операции на открытом руднике с близким к пиковому солнечным освещением. Ожидаемые проблемы искусственного освещения выходят за рамки данного исследования и должны быть изучены на более позднем этапе.
ОСНОВНЫЕ КОМПОНЕНТЫ СИСТЕМЫ
Требования к фороптике определяются геометрией лопаты и поверхностью верстака, см. Рисунок 2. В данном случае гидравлический экскаватор Caterpillar CAT6050 (Caterpillar Inc, 2016) выбран как типичный для большого гидравлического экскаватора. Расчеты для этой машины в равной степени применимы к электрическим канатным или гидравлическим экскаваторам аналогичного размера. Для удобства предполагается, что:
•высота уступа забоя 15 м
•расстояние от центра вращения лопаты до забоя составляет 15 м
•HSI устанавливается на ковше на высоте 7,5 м и в центре вращения ковша.
Таким образом, можно легко определить вертикальное поле зрения (FOV) как 53,1°. Фороптика отображает скамейку лицом к камере.
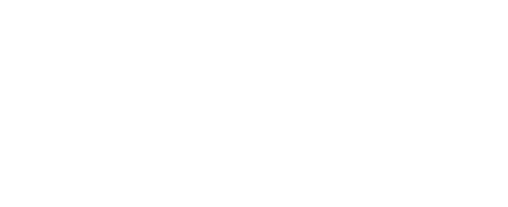
ФИГ. 2– Диаграмма, показывающая геометрию поверхности уступа и лопаты. Диаграмма лопаты основана на спецификации гидравлического экскаватора CAT6050 (Caterpillar Inc, 2016).

В любой момент времени изображение поверхности скамьи будет представлять собой один узкий вертикальный срез с конечной горизонтальной шириной, при этом мгновенное поле зрения (IFOV) объектива определяется по формуле:

При размере пикселя 30 мкм IFOV = 0,107°, что на расстоянии 15 м соответствует пространственному разрешению 30 мм, что во много раз меньше размера ковша лопаты.
Диапазон, в котором может быть сфокусирован объектив, определяется глубиной резкости (DOF), на которую влияет скорость объектива, определяемая числом f (f/#). Установка точки фокусировки системы на гиперфокальное расстояние, H, создает максимально возможную DOF (Kingslake, 1992). При такой настройке фокусировки все объекты между H/2 и бесконечностью будут находиться в приемлемом фокусе, определяемом кругом нерезкости (CoC). Большая DOF требуется для преодоления изменения расстояния между лицом и датчиком при вращении ковша. При выборе используемой фороптики минимальное рабочее расстояние (точка ближайшей фокусировки) должно быть меньше Н, определяемого следующим образом:

Было проведено исследование доступных линз для систем машинного зрения, в ходе которого более 100 имеющихся в наличии коммерческих линз были оценены по следующим критериям эффективности:
•Формат объектива должен быть совместим с 2/3” или
Датчиком формата 1”
•ф/#< 2.0
•ф< 20 мм
•рабочее расстояние <10 м
•Объектив с креплением C
•подходящий спектральный диапазон.
В таблице 1 перечислены подходящие объективы для использования в спектральной области VNIR. Из этого списка Schneider Cinegon 1.9/10 был признан наилучшим выбором. Существует множество подходящих COTS-объективов, доступных в спектральном диапазоне 800–2000 нм (Edmund Optics, 2017; StingRay Optics, 2014; Kowa Company, 2011), однако был найден только один с максимальной длиной волны пропускания более 2000 нм. Его характеристики приведены в таблице 2.
Спектрометр
В идеале один спектрометр должен охватывать весь диапазон от 400 до 2500 нм. Однако несколько физических факторов ограничивают одновременно используемый спектральный диапазон данного спектрометра, например, перекрытие порядков дифракции, эффективность решетки и детектора, а также пропускание оптики. Для одновременного покрытия всех диапазонов VNIR и SWIR потребуется не менее двух спектрометров.
Портативные, прочные спектрометры HSI (Lobb, 1997) теперь доступны для коммерческого использования, они подходят для использования в чрезвычайно сложных условиях, существующих на горнодобывающем оборудовании. Более 30 спектрометров HSI оцениваются по следующим функциональным требованиям:
•компактный дизайн
•нет движущихся частей
•нет криогенов
•спектральное разрешение <10 мм
•Угол обзора > 30°
•Длина щели >10 мм для соответствия датчику
•система совместима со сменной передней оптикой
•ф/# < 2.4
•частота кадров >30 Гц.
ТАБЛИЦА 1
Гиперспектральная визуализация (HSI) подходит для коммерческих готовых передовых оптических приборов для диапазона длин волн VNIR; т.е. 400–1000 нм (Шнайдер-Кройцнах, 2013).
ТАБЛИЦА 2
Подходящая коммерчески доступная передняя оптика для использования в
коротковолновом инфракрасном диапазоне (Optec Systems, 2016).
ПРОИЗВОДИТЕЛЬНОСТЬ СИСТЕМЫ
Частота кадров и пространственное разрешение
Эффективное пространственное разрешение в горизонтальном направлении определяется радиальной скоростью лопаты и частотой кадров детектора спектрометра. Для анализа мы предполагаем, что пиковая скорость вращения лопаты во время цикла копания-загрузки составляет 3,5 об/мин (Liebherr Mining Equipment, 2017), ~21°/с. Эта скорость в сочетании со временем экспозиции и IFOV, уравнение 2, определяет полезное пространственное разрешение системы. На своей максимальной скорости ковш будет захватывать сегмент, в 200 раз больший, чем IFOV, каждую секунду.
Мы также предполагаем, что время экспозиции составляет 33 мс, т. е. данные получаются при видеочастоте 30 кадров в секунду (fps). При таких скоростях ковш будет захватывать дугу до 6,5 × IFOV в каждом кадре. Таким образом, учитывая, что IFOV соответствует пикселю 30 мкм, в каждом кадре при видеочастоте каждый пространственный пиксель будет получать информацию из горизонтального сечения поверхности уступа, стягивающего приблизительно 7°, что соответствует горизонтальному расстоянию ~200 мм при радиусе 15 м. Это эффективный предел пространственного разрешения в горизонтальном направлении, и он все еще намного меньше размера ковша. Вертикальное разрешение может быть выбрано как любое произвольное значение больше одного пикселя.
Чувствительность системы
Шумовые характеристики трех различных типов детекторов были рассчитаны на трех длинах волн: 800, 1600 и 2200 нм, см. Таблицу 4. Эти детекторы являются типичными для тех, которые используются в коммерческих HSI для этих диапазонов длин волн, см. Таблицу 3. Эквивалентная шуму мощность (NEP) определяется как падающая мощность, которая создает отношение сигнал/шум (SNR) 1, с выходной полосой пропускания 1 Гц. Параметр шума для 2200 нм - это эквивалентная шуму спектральная яркость (NESR). Подобно NEP, он представляет падающую спектральную яркость, которая создает отношение сигнал/шум 1, с полосой пропускания 1 Гц. Это значение NESR является измеренной шумовой характеристикой для полной системы спектрометра, а не для изолированного детектора.
Количество солнечного излучения, освещающего поверхность скамьи, определяется спектральной плотностью солнечного излучения, Eеλ(ASTM, International, 2012). Для анализа предположим, что поверхность скамьи имеет среднюю отражательную способность 50 процентов и является ламбертовской, т.е. отраженный свет равномерно распределяется через телесный угол 2π ср. Следовательно, спектральная яркость излучения, отраженного от поверхности скамьи и освещающего спектрометр, равна:
Лучистый поток, падающий на отверстие оптической системы, определяется по формуле:

η- это коэффициент пропускания оптических элементов
А - площадь поперечного сечения отверстия
Ω - это проецируемый телесный угол луча
Значения облученности, представленные в Таблице 5, были использованы для расчета потока излучения на отдельный пиксель для двух различных типов детекторов на 800 и 1600 нм. Затем это сравнивается с NEP, указанным в Таблице 4, для расчета SNR, которое для заданного времени экспозиции te определяется как:

ТАБЛИЦА 3
Таблица, показывающая различные характеристики отобранных спектрометров в коротковолновой инфракрасной области (SWIR) и видимой ближней инфракрасной области (VNIR) диапазона. (*) Означает, что максимально достижимое поле зрения является взаимозаменяемым в зависимости от конфигураций.
ТАБЛИЦА 4
Рабочие характеристики детектора (TrueSense Imaging, 2012; Sensors Unlimited, 2013; Norsk Elektro Optikk, 2012).
Для 800 и 1600 нм эквивалентная мощность шума (NEP) была рассчитана на основе параметров.
ТАБЛИЦА 5
Пиковая солнечная яркость, коэффициент пропускания и отношение сигнал/шум (SNR) для трех различных типов детекторов на выбранных длинах волн. Значения для всех длин волн предполагают время экспозиции 33 мс, а для 800 и 1600 нм предполагают спектральную ширину полосы 5 нм. Эти значения несколько выше (3–8 дБ), чем измеренные с помощью реального спектрометра в шахте с железной рудой (Schneider et al, 2009).
Не существует определенных рекомендаций по минимальному SNR для спектрометров; спектры по своей природе будут иметь большие вариации в силе принимаемого сигнала, и некоторые материалы будут иметь гораздо более низкую отражательную способность, чем другие. Некоторые характеристики поглощения имеют глубину всего несколько десятых процента по сравнению с отражательной способностью континуума (Goetz, 2009). Требуемое SNR будет зависеть от приложения. Если мы предположим минимальное SNR в 20 дБ, то изменение правильности обнаружения характеристики поглощения с глубиной в 1 процент от уровня континуума составит всего 50 процентов. Две из успешных систем, обсуждавшихся ранее, имели SNR в 40 дБ (Goetz, 2009; Murphy and Monteiro, 2013). Поэтому мы можем сделать вывод, что диапазоны VNIR имеют достаточную чувствительность для работы на скоростях видео при пиковом солнечном освещении. Однако диапазон SWIR будет иметь едва ли удовлетворительную чувствительность даже при пиковой солнечной радиации и, в зависимости от конкретного применения, вероятно, потребует более длительной или многократной экспозиции и значительно сниженного углового разрешения.
СПЕКТРАЛЬНАЯ КЛАССИФИКАЦИЯ В РЕАЛЬНОМ ВРЕМЕНИ
Методы спектрального сопоставления использовались в дистанционном зондировании для автоматизированного и быстрого сравнения измеренных и эталонных спектров путем оценки сходства двух спектров (Van Der Meer, 2006). Они имеют относительно скромные требования к вычислительной мощности и являются отличными кандидатами для системы реального времени.
Эти методы эффективно сравнивают структуру двух спектров, например, положение, форму и глубину особенностей поглощения. Наиболее широко используемый из них — метод Spectral Angle Mapper (SAM) (Hecker et al, 2008; Kruse et al, 1993). Измеренный и эталонный спектры обрабатываются как два n-элементных вектора, где n — количество спектральных пикселей. Угол между этими векторами измеряется обычным способом, скалярным произведением, деленным на произведение величины двух векторов. Этот угол называется спектральным углом и является метрикой сходства между двумя спектрами. Чем меньше спектральный угол, тем более похожи спектры.
Скалярное произведение может быть выполнено приблизительно за четыре операции с плавающей точкой (FLOP), поэтому два спектра с n спектральными элементами можно сравнить за 4n FLOP. Если предположить, что 64 вертикальных пикселя с 256 спектральными каналами сравниваются с 16 эталонными спектрами при 32 кадрах в секунду, скорость обработки составит 32 MFLOP. Классификатор SAM в реальном времени для классификации рудных сортов был запущен с 480 пространственными и 213 спектральными пикселями при видеочастоте на ПК с тактовой частотой 1,8 ГГц (Smith et al, 2005; Swanson, 2005). Таким образом, SAM в реальном времени может быть реализован непосредственно на борту HSI с использованием легкодоступного процессора с умеренными требованиями к производительности.
Метод SAM измеряет только угол между двумя векторами, он не измеряет длину или величину ни измеренного, ни эталонного спектра. В результате он измеряет только различия в структуре спектров, а не относительную освещенность каждого из них. Поэтому SAM нечувствителен к некоторым изменениям интенсивности освещения, таким как наличие тени. Диапазон освещенности, который может выдержать метод SAM, должен быть определен эмпирически. Некоторые реализации SAM не смогли успешно классифицировать затененные области на поверхности уступа (Murphy, Monteiro and Schneider, 2012).
Поскольку метод SAM нечувствителен к изменениям общего уровня освещенности ((Schneider, Murphy и Melkumyan, 2014)) и требует изменения структуры спектров для сравнения, он может оказаться неподходящим алгоритмом для различения руд, в которых наблюдается небольшое изменение формы спектров, но отражательная способность которых изменяется почти на постоянный коэффициент в значительной части спектров, например, уголь (Swanson, 2005; Kurz и Buckley, 2012) и железные руды мартит и гетит (Murphy, Monteiro и Schneider, 2012).
Другая группа методов анализа состава материалов, широко используемых в дистанционном зондировании, — это субпиксельные методы (Van Der Meer et al, 2012). Они используют методы разделения гиперспектральных изображений для определения относительного содержания различных материалов, которые наблюдаются одним пикселем. Они также известны как алгоритмы спектрального смешивания, спектрального разделения или извлечения конечных членов (Somers et al, 2012; Keshava, 2003). Разработана спектральная эталонная библиотека чистых образцов. Эти библиотечные спектры называются спектральными конечными членами. Затем измеренный спектр моделируется как линейная или нелинейная комбинация спектров конечных членов. Самым важным фактором, влияющим на успешность этих методов, является разработка библиотеки с правильными материалами и правильным количеством конечных членов. Поскольку эта спектральная эталонная библиотека содержит только спектры конечных членов, это должно быть более просто для разработки, по сравнению с тем, что для SAM. Однако их пригодность субпиксельных методов для автоматизированных операций в реальном времени еще не определена.
СИСТЕМНАЯ ИНТЕГРАЦИЯ
Успех системы, развертываемой в полевых условиях, помимо производительности спектрометра, зависит от способности системы работать в режиме реального времени как часть более крупной операционной системы. Ключевые компоненты системы характеристики руды в реальном времени показаны на рисунке 3 и охватывают ряд системных факторов от калибровки оборудования, получения данных, слияния датчиков, предварительной обработки и обработки информации для моделирования и систем поддержки принятия решений (DSS).
В предыдущих разделах мы рассмотрели некоторые из ключевых ограничений и критических возможностей производительности системы. Таким образом, в этом разделе не предполагается подробно описывать всю задачу системной инженерии, а вместо этого выделить некоторые ключевые факторы, которые могут повлиять на производительность развертываемой в полевых условиях системы.
Калибровка системы
Одной из важнейших возможностей системы является поддержание точных данных, что зависит от ее способности к самокалибровке или калибровке с разумной частотой. Например, было бы непрактично, если бы систему нужно было калибровать каждый день, и процесс прерывал бы операции экскаватора. Влияние затрат только этого может снизить воспринимаемую ценность, реализуемую в шахте. Если мы предположим, что горнодобывающая операция является производителем твердого коксующегося угля второго квартиля с долгосрочной операционной маржой 40 долл. США/т и скоростью выемки 2000 т/ч, то возможность прироста стоимости, упущенная из-за остановки операций, составляет 80 000 долл. США в час. Если мы предположим, что процесс калибровки занимал 15 минут в день, влияние стоимости составит 2000 долл. США/день или значительно более 500 000 долл. США в год.
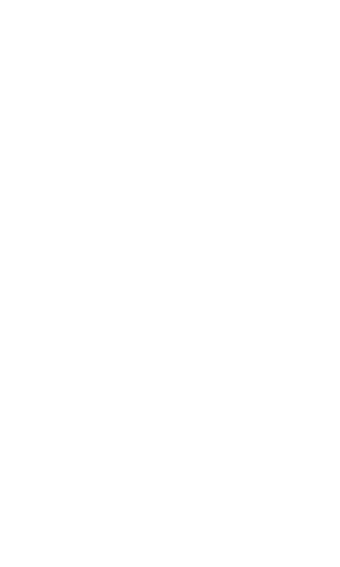
ФИГ. 3– Упрощенный алгоритм, показывающий взаимодействие различных компонентов системы гиперспектральной визуализации (HSI). Компоненты системы HSI взаимосвязаны и должны работать в режиме реального времени по всей системе, чтобы обеспечить точный и своевременный вывод информации.
Для достижения калибровки в реальном времени можно стратегически разместить цель с известной отражательной способностью в различных частях операции в поле зрения лопаты. Эта цель должна иметь схожие характеристики освещенности с характеристиками забоя шахты. Такой подход может оказаться непрактичным и должен быть определен эмпирически. Кроме того, требование калибровки в реальном времени должно быть дополнено оптоволоконными датчиками нисходящей освещенности (FODIS) для алгоритмов компенсации атмосферы.
Требования к объединению и регистрации датчиков
Как показано на рисунке 1, даже самые элементарные системы HSI требуют определенной степени слияния датчиков: гиперспектральные данные должны быть слиты с пространственной информацией, по крайней мере. Источником пространственной информации для регистрации может быть лидар или средство стереопсиса. Предыдущая работа была завершена Курцем, Бакли и Хауэллом (2012) в отношении слияния лидара с наземным геологическим сканированием; однако это было основано на датчиках с фиксированным местоположением, которые не подходят для динамического моделирования.
Помимо пространственной и геопространственной регистрации информации, может также потребоваться регистрация с другими данными датчиков. Если гиперспектральные данные должны быть получены при динамически изменяющемся освещении или условиях окружающей среды, любые алгоритмы обработки в реальном времени потребуют данных от ряда датчиков, таких как FODIS, атмосферные измерения, датчики пыли или вибрации. Поэтому общая цель получения данных заключается не в полной предварительной обработке всей информации, а в обеспечении точной мультисенсорной регистрации перед обработкой гиперспектральной информации.
Процесс получения данных
Как показано в этой статье, это предлагаемое применение HSI представляет множество уникальных проблем и факторов, которые необходимо контролировать для достижения высококачественного и своевременного получения данных. Факторы, которые влияют на производительность системы HSI, включают, например, местоположение датчика, освещение, углы наблюдения цели и датчика, ориентацию транспортного средства, атмосферные условия, оптику и датчики.
Для того чтобы система предоставляла высокоточную и своевременную информацию, необходимо рассмотреть, как различные источники получают данные с ряда рассредоточенных датчиков и передают в центральную точку обработки. Бакли и др. (2013) описывают один из таких методов слияния лидарных данных с гиперспектральными данными для геологического картирования обнажений. Однако предлагаемая здесь система потребует возможности динамической пространственной регистрации информации облака точек высокой плотности в режиме реального времени. Это потребует дополнительных исследований перед установкой такой системы на машину для полевого развертывания. Это может увеличить вычислительные требования, но, как ожидается, будет в пределах возможностей программируемых вентильных матриц (FPGA) или графических процессоров (GPU).
Еще одной областью исследований является разработка необходимого вычислительного и технологического оборудования для обеспечения быстрого и точного вычисления результатов и хранения требуемых данных. Одной из областей активных исследований являются распределенные высокопроизводительные вычислительные подходы для управления большими объемами данных в режиме реального времени (Bioucas-Dias et al, 2013). При определенных обстоятельствах данные могут передаваться непосредственно из местоположения датчика в облачное хранилище данных. Эти датчики могут получать информацию и передавать ее в любое время из любого местоположения, причем данные каждого датчика также предоставляют геопространственную информацию об обнаруженной цели, а также другую информацию с датчиков, включая полученные данные о времени, гиперспектральные данные или другие представляющие интерес характеристики.
Одним из преимуществ этого подхода к получению данных является возможность выбора нескольких датчиков, подключенных к Интернету для повышения вычислительной эффективности. Предпочтительным вариантом подхода к слиянию датчиков является передача предварительно откалиброванных данных в центральную точку для предварительной и последующей обработки. Этот подход обеспечивает возможность параллельной обработки данных с нескольких датчиков и обновления зарегистрированных геопространственных и гиперспектральных наборов данных в широком диапазоне местоположений датчиков.
Этот процесс может поддерживаться дополнительными датчиками или другими источниками информации, такими как метеорологические службы, для дальнейшего предоставления совместно зарегистрированной информации. Проблема этого подхода для наземной системы в удаленном месте заключается в способности поддерживать доступ к требуемой полосе пропускания. Таким образом, развертывание полевого подразделения, по крайней мере в первых итерациях, скорее всего, будет в значительной степени зависеть от бортовой обработки.
Разработка геологической модели и системы поддержки принятия решений
Горнодобывающая промышленность изобилует множеством технически обоснованных инженерных решений, которые не достигают успешного широкомасштабного развертывания в полевых условиях; любая система полезна лишь настолько, насколько полезна информация, которую она может предоставить в необходимые сроки. Чтобы обеспечить предоставление правильной информации в нужное время для обновления геологической модели или DSS в реальном времени, необходимо рассмотреть возможность интеграции в существующие сети и системы связи шахт. Кизироглоу и др. (2016) обсудили важную роль, которую эта интеграция, как ожидается, будет играть в достижении эффективности подходов к расширенному мониторингу содержания руды, таких как система, описанная в этой статье.
ВЫВОДЫ
В настоящее время существуют недостатки в характеристике руды в реальном времени во многих горнодобывающих операциях по всему миру, которые ограничивают оптимизацию производительности шахты. В этой статье представлено исследование на бумаге системы на основе HSI в качестве решения для характеристики руды, которая является реальной и неинвазивной, с потенциалом для применения в автономных операциях. Упражнение предполагает, что HSI может быть успешно использовано для картирования характеристик материала и руды по всему забою шахты. Существует ряд коммерчески доступных гиперспектральных камер со спецификациями, которые соответствуют требованиям для этого применения и подходят для установки на ковш. Также легко доступны оптические компоненты, которые соответствуют требованиям геометрии ковша/забоя шахты на протяжении типичного цикла копания-погрузки. Существуют автоматизированные методы в реальном времени для классификации материалов в забое уступа. Пространственное разрешение системы является произведением скорости качания ковша и частоты кадров спектрометра. При скорости видео 30 кадров в секунду спектрометр может достигать пространственного разрешения <0,5 м.
Таким образом, существует возможность для системы характеристики руды HSI в реальном времени, устанавливаемой на экскаватор, достичь повышенной ценности для отрасли. Например, можно развернуть одиночный спектрометр в диапазоне от визуального до ближнего инфракрасного, который может отличать металлические руды от отходов в реальном времени, на скорости видео.
Однако спектрометр сможет достичь скорости видеосъемки при солнечном освещении только в течение части дня. Требования к работе при маргинальном освещении или в ночное время, а также влияние на производительность необходимо будет изучить до полевого развертывания.
Хотя ряд компонентов системы был описан, точное получение данных остается важной проблемой. Был достигнут прогресс на основе настольного моделирования, чтобы доказать возможность точного получения данных с использованием готовых компонентов. Однако требуется больше работы, чтобы экспериментально подтвердить необходимость скоростей видео для получения данных и требуемого пространственного разрешения.
После решения этих дополнительных вопросов появляется значительная возможность создания ценности для горнодобывающей промышленности за счет использования устанавливаемой на экскаватор системы HSI для определения характеристик угля или руды в режиме реального времени.
ASTM Интернешнл,2012. G173–03 – Стандартные таблицы для эталонных спектральных значений солнечного излучения, прямого нормального и полусферического, на наклонной под углом 37 градусов поверхности, Западный Коншохокен, Пенсильвания.
Бамбер,A, Alatrash, A, Petrovic, I и Desaulniers, G, 2016. Горный экскаватор с композиционными датчиками, заявка на патент США US2016/0016202A1.
Биокас-Диас,JM, Plaza, A, Camps-Valls, G, Scheunders, P, Nasrabadi, NM и Chanussot, J, 2013. Анализ данных гиперспектрального дистанционного зондирования и будущие проблемы, IEEE Geoscience and Remote Sensing Magazine, стр. 6–36.
Болин,BJ и Moon, TS, 2003. Обнаружение сульфидов в керне скважин из комплекса Стиллуотер с использованием спектроскопии видимого/ближнего инфракрасного изображения, Geophysics, 68(5):1561–1568.
Броссар,М, Мэрион, Р. и Каррер, В., 2016. Деконволюция спектров отражения SWIR для автоматической идентификации минералов в гиперспектральных изображениях, Remote Sensing Letters, 7(6):581–590.
Бакли,SJ, Kurz, TH, Howell, JA и Schneider, D, 2013. Продукты слияния данных наземного лидара и гиперспектральных данных для анализа геологических обнажений, Computers and Geosciences, 54:249–258.
Гусеница Inc,2016. Технические характеристики гидравлического экскаватора CAT6050/6050 FS [онлайн]. Доступно на <http://www.cat.com/> [Дата обращения: 13 сентября 2016 г.].
Чандрасекар,Н., Муджабар, П. и Раджаманикам, Г.В., 2011. Исследования месторождений тяжелых минералов с использованием многоспектральных спутниковых данных, Международный журнал дистанционного зондирования, 32(23):8641–8655.
Чанг,C, 2016. Прогрессивная гиперспектральная обработка изображений в реальном времени (Springer: Baltimore).
Кларк,RN, 1999. Спектроскопия горных пород и минералов и принципы спектроскопии, в книге «Дистанционное зондирование для наук о Земле. Руководство по дистанционному зондированию», 3-е издание (ред. AN Rencz), глава 1, стр. 3–58 (Wiley and Sons: Денвер).
Кудахи,TJ и Ramanaidou, ER, 1997. Измерение соотношения гематита к гетиту с использованием полевой видимой и ближней инфракрасной отражательной спектрометрии в русловых железных месторождениях, Западная Австралия, Australian Journal of Earth Sciences, 44(4):411–420.
Эдмунд Оптикс,2017. SWIR-объективы с фиксированным фокусным расстоянием [онлайн]. Доступно по адресу <https://www.edmundoptics.com/imaging-lenses/fixed-focal-length-lenses/swir-fixed-focal-length-lenses/> [Дата обращения: 25 января 2017 г.].
Фрейзер,SJ, Whitbourn, L, Yang, K, Ramanaidou, E, Connor, P, Poropat, G, Soole, P, Mason, P, Coward, D и Phillips, R, 2006. Минералогическое картирование лиц с использованием гиперспектрального сканирования для картирования и контроля за горными работами, на Шестой международной конференции по геологии горного дела (ред. S Dominy), стр. 227–232 (Австралазийский институт горного дела и металлургии: Мельбурн).
Галли,EA, McArdle, S, Rivard, B и Francis, H, 2002. Оценка содержания сульфидной руды в разрушенной породе с использованием видимых/инфракрасных гиперспектральных спектров отражения, Международный журнал дистанционного зондирования, 23(11):2229–2246.
Гетц,AFH, 2009. Три десятилетия гиперспектрального дистанционного зондирования Земли: личный взгляд, Дистанционное зондирование окружающей среды, 113:S5–S16.
Гетц,AFH, Curtiss, B и Shiley, DA, 2009. Быстрое измерение концентрации минералов пустой породы на конвейерах с помощью спектроскопии отражения в ближнем ИК-диапазоне, Minerals Engineering, 22:490–199.
Хауфф,P, 2013. Обзор полевой спектроскопии VIS-NIR-SWIR применительно к разведке драгоценных металлов [онлайн]. Доступно по адресу: <http://www.spectral-international.com/files/50329239.pdf> (Spectral International Inc: Денвер).
Хеккер,C, Meijde, M, Werff, H и Meer, F, 2008. Оценка влияния эталонных спектров на результаты синтетической классификации SAM, Труды IEEE по геонаукам и дистанционному зондированию, 46(12):4162–4712.
Хант,GR, 1977. Спектральные характеристики частиц минералов в видимом и ближнем инфракрасном диапазонах, Geophysics, 42(3):501–513.
Хант,GR и Ashley, RP, 1979. Спектры измененных пород в видимом и ближнем инфракрасном диапазонах, Economic Geology, 74:1613–1629.
Кешава,N, 2003. Обзор алгоритмов спектрального разложения, Lincoln Laboratory Journal, 14(1):55–78.
Кингслейк,Р, 1992. Оптика в фотографии, 288 стр. (SPIE: Bellingham).
Кизироглу,ME, Boyle, DE, Yeatman, EM и Cilliers, JJ, 2016. Возможности сенсорных систем в горнодобывающей промышленности, IEEE Transactions on Industrial Informatics, 1 стр.
Компания Kowa,2011. Технические характеристики промышленных объективов FA, версия 1.1 (Kowa Company Ltd: Токио).
Крузе,FA, Lefkoff, AB, Boardman, JW, Heidebrecht, KB, Shapiro, AT, Barloon, PJ и Goetz, AFH, 1993. Система обработки спектральных изображений (SIPS) — интерактивная визуализация и анализ данных спектрометра изображений, Дистанционное зондирование окружающей среды, 44:144–163.
Курц,TH, Buckley, SJ и Howell, JA, 2012. Гиперспектральная съемка с близкого расстояния, интегрированная со сканированием наземного ЛИДАРа, применяемая для характеристики горных пород в сантиметровом масштабе, Международный архив фотограмметрии, дистанционного зондирования и пространственной информации XXXIX.B5, стр. 417–422.
Горнодобывающее оборудование Liebherr,2017. Технические характеристики карьерного экскаватора R 996 B [онлайн]. Доступно по адресу <https://www.liebherr.com/external/products/products-assets/250650/NTB_R996B_enGB-US.pdf> [Дата обращения: 25 января 2017 г.].
Лобб,DR, 1997. Спектрометры визуализации с использованием концентрической оптики, Imaging Spectrometry III (редакторы: MR Descour и SS Shen), 3118:339–347 (SPIE Press: Сан-Диего).
Магендран,T и Sanjeevi, S, 2011. Оценка сортов железных руд Ноамунди, Индия, с помощью наземного гиперспектрального дистанционного зондирования, Международный журнал наук о Земле и инжиниринга, 4(8):7–16.
Макет,M, Cervelle, BD и Gouet, G, 1981. Признаки Ni2+ и Fe3+ в оптических спектрах лимонитовой руды из Новой Каледонии: применение для определения содержания никеля, Mineralium Deposita, 16:357–373.
Макконахи,TF, Yang, K, Boni, M и Evans, N, 2007. Спектральное отражение: предварительные данные о новой технологии с потенциалом для разведки несульфидных цветных металлов, Геохимический анализ среды разведки, 7:139–151.
Мерфи,RJ, Melkumyan, A, Chlingaryan, A, Nguyen, DB, Wishart, S, Lowe, A и Scheding, S, 2016. Метод и устройство для получения гиперспектральных изображений, австралийская патентная заявка WO201611243OA1.
Мерфи,RJ и Monteiro, ST, 2013. Картографирование распределения минералов трехвалентного железа на вертикальном забое шахты с использованием производного анализа гиперспектральных изображений (430–970 нм), ISPRS Journal of Photogrammetry and Remote Sensing, 75:29–39.
Мерфи,RJ, Monteiro, ST и Schneider S, 2012. Оценка методов классификации для картирования вертикальной геологии с использованием полевых гиперспектральных датчиков, IEEE Transactions on Geoscience and Remote Sensing, 50(8):3066–3080.
Норск Электро Оптик,2012. Технические характеристики SWIR-320m-e [онлайн]. Доступно по адресу: <http://www.hyspex.no/products/ disc/swir-320m-e.php> [Дата обращения: 25 января 2017 г.].
Системы Оптек,2016. Характеристики объектива OB-SWIR16/1.7-PN C1015 [онлайн]. Доступно по адресу: <http://www.optec.eu/pdf/ob-swir/C1015.pdf> [Дата обращения: 17 января 2017 г.].
Раманаиду,ER и Уэллс, MA, 2011. Гиперспектральная съемка железных руд, в Трудах 10-го Международного конгресса по прикладной минералогии (ред.: MATM Mroekmans), стр. 575–580.
Роббен,M, Buxton, M, Dalmijn, W, Wotruba, H и Balthasar, D, 2010. Сортировка с помощью ближней инфракрасной спектроскопии (NIRS) при обогащении и переработке несульфидной цинковой руды месторождения Скорпион, XXV Международный конгресс по переработке полезных ископаемых (IMPC), 2010.
Робинсон,ДК, Мелкумян, А. и Члингарян А., 2016. Оценка свойств материалов, заявка на патент США US2016/0033676A1.
Шнайдер-Кройцнах, 2013. Cinegon 1.8/4.8, Cinegon 1.4/8, Cinegon 1.4/12 мм, Cinegon 1.9/10, объектив/линзы C-Mount IR (400–1000 нм), технические характеристики [онлайн]. Доступно на <http://www.schneiderkreuznach.com> [Дата обращения: 17 января 2017 г.].
Шнайдер,S, Melkumyan, A, Murphy, RJ и Nettleton, E, 2012. Система геологического восприятия для автономной добычи полезных ископаемых, Международная конференция IEEE по робототехнике и автоматизации 2012 г., стр. 2986–2991.
Шнайдер,S, Murphy, RJ и Melkumyan, A, 2014. Оценка эффективности нового классификатора – GP-OAD: сравнение с существующими методами классификации типа горных пород и минералогии по гиперспектральным изображениям, ISPRS Journal of Photogrammetry and Remote Sensing, 98:2145–2156.
Шнайдер,S, Murphy, RJ, Melkumyan, A и Nettleton, E, 2011. Автономное картирование геологии забоя шахты с использованием гиперспектральных данных, 35-й симпозиум APCOM 2011.
Шнайдер,S, Murphy, RJ, Monteiro, ST и Nettleton, E, 2009. О разработке гиперспектральной библиотеки для автономных систем добычи полезных ископаемых, Австралазийская конференция по робототехнике и автоматизации (ACRA) 2009.
Датчики Неограниченные,2013. Высокочувствительная InGaAs SWIR-камера GA1280J с высоким разрешением и защитой от неблагоприятных факторов [онлайн]. Доступно по адресу <https://www.photonicsonline.com/doc/mil-rugged-high-resolution-snapshot-swir-camera-datasheet-0001> [Дата обращения: 25 января 2017 г.].
Смит,C, Swanson, R, Kehoe, M, Moon, T и Bolin, B, 2005. Гиперспектральная визуализация для сортировки руды в реальном времени, Применение компьютеров и исследований операций в горнодобывающей промышленности (редакторы: S Dessureault, R Ganguli, V Kecojevic и J Dwyer), стр. 565–570.
Сомерс,Б., Зортеа, М., Плаза, А. и Аснер, Г.П., 2012. Автоматизированное извлечение пучков конечных элементов на основе изображений для улучшенного спектрального разделения, Журнал IEEE по избранным темам в области прикладных наблюдений Земли и дистанционного зондирования, 5(2):396–408.
StingRay Оптика,2014. Lens Inventory [онлайн]. Доступно на <www.stingrayoptics.com> [Дата обращения: 25 января 2017 г.].
Свонсон,R, 2005. Датчик содержания руды в угле в реальном времени (C2OG), Заключительный отчет. Технический отчет DE-FC26–01NT41057 (Resonon: Bozeman).
Тангавелу,М., Шанмугам, С. и Бхаттачарья, АК, 2011. Гиперспектральная радиометрия для количественной оценки содержания железных руд на рудниках Ноамунди и Джода в восточной Индии, Индийское общество дистанционного зондирования, 39(4):473–483.
Томра Сортировка,2012. TITech autosort 4 [онлайн]. Доступно по адресу <http://direct.dksh.com.au/files/product_docs/Autosort%204.pdf> [Дата обращения: 17 января 2017 г.].
TrueSense-визуализация,2012. Датчик изображения KAF-0402, полнокадровый ПЗС-датчик изображения 768(H) × 512(V), Технические характеристики устройства, Версия 1.0 PS-0028 (TrueSense Imaging Inc: Рочестер).
ван дер Меер,F, 2006. Эффективность мер спектрального сходства для анализа гиперспектральных изображений, Международный журнал прикладного наблюдения за Землей и геоинформатики, 8(2006):3–17.
ван дер Меер,Ф.Д., ван дер Верфф, HMA, ван Рютенбек, FJA, Хекер, К.А., Баккер, В.Х., Ноомен, М.Ф., ван дер Мейдже, М., Карранса, Э.Дж.М., де Смет, Дж.Б. и Вольдаи, Т., 2012. Мульти- и гиперспектральные геологическое дистанционное зондирование: обзор, Международный журнал прикладного наблюдения за Землей и геоинформатики, 14 (2012): 112–128.