Оставить заявку
Для заказа и получения более подробной информации оставьте заявку, наш менеджер свяжется с Вами!
Нажимая на кнопку, вы даете согласие на обработку персональных данных и соглашаетесь c политикой конфиденциальности
Обработка и 3D-интеграция наземной гиперспектраологической съемки удаленных объектов для геологического применения
1 Хельмгольц-центр Дрезден-Россендорф, Гельмгольцевский институт Фрайберга по технологиям ресурсов, отдел «Технологии разведки», Хемницер штрассе 40, 09599 Фрайберг, Германия; m.kirsch@hzdr.de (М.К.); r.zimmermann@hzdr.de (Р.Ц.); g.unger@hzdr.de (Г.У.); r.gloaguen@hzdr.de (Р.Г.)
2 Отдел петрологии и экономической геологии, Геологическая служба Дании и Гренландии, 1350 Копенгаген K, Дания; ssal@geus.dk (С.С.); evs@geus.dk (Э.В.С.)
3 Департамент наук о Земле и управления природными ресурсами, Копенгагенский университет, 1165 Копенгаген K, Дания
4 Корреспонденция: s.lorenz@hzdr.de; Тел.: +49-351-260-4487
Опубликовано: 26 января 2018 г.
Аннотация: В последнее время наземная гиперспектральная съемка вышла на первый план, поддерживая трудоемкую задачу картирования почти вертикальных, труднодоступных геологических обнажений. Применение съемки обнажений на расстоянии от одного до нескольких сотен метров, включая геометрическую коррекцию и интеграцию с точными моделями наземного лазерного сканирования, уже быстро развивается. Однако существует мало исследований, посвященных наземной съемке удаленных объектов (т.е. на расстоянии в несколько километров), таких как горные хребты, утесы и борта карьеров. В частности, экстремальное влияние атмосферных эффектов и различий в освещении, вызванных рельефом, оставалось нерешенной проблемой для спектральных данных. Эти эффекты не могут быть скорректированы с помощью обычных инструментов коррекции для надирных спутниковых или авиационных данных. Таким образом, в этой статье представлен адаптированный рабочий процесс для преодоления проблем съемки удаленных обнажений, включающий простую атмосферную и топографическую коррекцию. Используя два набора данных с разными характеристиками, мы демонстрируем применение рабочего процесса и подчеркиваем важность представленных коррекций для надежной геологической интерпретации. Полученные продукты спектрального картирования интегрируются с 3D-фотограмметрическими данными для создания крупномасштабных, так называемых «гипероблаков», то есть геометрически корректных представлений гиперспектрального куба данных. Представленный рабочий процесс открывает новый спектр возможностей применения гиперспектральных изображений, значительно увеличивая масштаб наземных измерений.
Ключевые слова: гиперспектральный; топографическая коррекция; атмосферная коррекция; радиометрическая коррекция; дальний диапазон; большое расстояние; Structure from Motion (SfM); фотограмметрия; минеральное картирование; картирование по положению минимума поглощения; Маарморилик; Риотинто
1. Введение
Гиперспектральная съемка все чаще используется для поддержки кампаний по разведке полезных ископаемых и геологическому картированию. Полученные спектральные сигнатуры предоставляют детальную информацию о составе горных пород и наличии экономически важных минералов. Гиперспектральные приборы обычно эксплуатируются с надирным углом обзора, обеспечивая различные масштабы покрытия площади и пространственного разрешения при работе на спутнике [1,2], самолете [3-6] или дроне [7]. В зависимости от высоты съемки в полученных спектральных изображениях можно наблюдать переменное влияние атмосферы между датчиком и объектом, а также различия в освещении из-за рельефа. Многочисленные подходы были предложены в попытке преодолеть эти эффекты: атмосферные влияния либо корректируются с помощью атмосферного моделирования с использованием моделей переноса излучения (например, [8-10]), использования наземных целей с известными или предполагаемыми спектрами (эмпирическая линейная калибровка [11], коррекция по однородному полю [12], вычитание темного объекта [13]), либо комбинации того и другого [14]. В то время как модели переноса излучения полагаются на правильный ввод набора внешних параметров и в основном используются для спутниковых и авиационных данных, использование наземных целей, темных объектов или однородных полей обеспечивает гораздо более простой подход. Однако эти методы требуют достаточно высокого пространственного разрешения, чтобы можно было различить спектрально однородные эталонные объекты, и/или разумного знания спектров присутствующих материалов, и поэтому используются в основном для данных с дронов или самолетов на малых высотах съемки (например, [7,15]).
За последние несколько лет появился наземный подход к использованию гиперспектральных сенсоров для геологических приложений. Устройство, установленное на штативе, может использоваться для быстрого получения спектрально и пространственно высокодетальных данных о почти вертикальных геологических обнажениях, то есть о пространственных ориентациях, которые не видны (или почти не видны) приборам с надирной съемкой. Почти вертикальные обнажения могут включать крутые горные склоны, обращенные к воде утесы, стенки открытых карьеров и дорожные выемки. Особенно в арктических или влажных регионах, где снег и лед, лишайники или густая растительность покрывают поверхность Земли, исследование таких естественных или искусственных разрезов может быть единственной возможностью получить спектральную информацию о местной геологии. В настоящее время наземные гиперспектральные сенсоры для геологических приложений используются почти исключительно для целей на расстоянии от одного до нескольких сотен метров (например, [16-18]). В этом диапазоне пространственное разрешение варьируется от сантиметрового до дециметрового масштаба, достаточного для разрешения даже мелкомасштабных минеральных соединений и разломных систем. Еще одним значительным преимуществом измерений с близкого расстояния является незначительное влияние атмосферы, что потенциально исключает необходимость сложной радиометрической коррекции. Вместо этого эмпирического линейного подхода с использованием эталонных целей, имеющих ту же ориентацию, расстояние и условия освещения, что и геологический объект, достаточно для преобразования в коэффициенты отражения. Однако наблюдение геологического объекта с близкого расстояния не всегда возможно или целесообразно. В частности, более крупные и вертикально ориентированные объекты, такие как крутые горные склоны, морские или озерные утесы и стенки больших открытых карьеров, часто полностью видны только с противоположной точки, например, с соседней горы [19], уступа карьера, берега или даже с лодки [20]. Расстояние между датчиком и интересующим объектом может тогда легко превысить ближний диапазон и достичь нескольких километров. Эти расстояния приводят не только к серьезным атмосферным искажениям, но и препятствуют логистическому размещению видимых эталонных целей для радиометрической коррекции, а также наземных контрольных точек для геопривязки изображений. Кроме того, из-за гораздо большего масштаба наблюдаемой поверхности и наземной перспективы съемки пиксели в пределах одной сцены могут представлять диапазон различных расстояний и ориентаций, что приводит к сильно изменчивым радиометрическим искажениям. По этим причинам методы коррекции, установленные для надирных съемок, неприменимы или требуют серьезной модификации, чтобы учесть особые условия наземной съемки дальнего диапазона.
В этой статье мы решаем эти дополнительные задачи и представляем новый рабочий процесс, который позволяет создавать полностью скорректированные наземные гиперспектральные данные дальнего диапазона для геологических приложений. В дополнение к коррекции геометрических искажений, вызванных сенсором, рабочий процесс теперь включает новый подход к радиометрической коррекции наземных данных дальнего диапазона, а также алгоритм топографической коррекции, основанный на интеграции с 3D-данными поверхности с использованием алгоритмов автоматического сопоставления. Мы также описываем подробную методологию создания 3D-гипероблаков, то есть геометрически корректных представлений гиперспектрального куба данных, для отображения созданных продуктов спектрального картирования. Представленные методы будут включены в открытый инструментарий Python для гиперспектральной разведки полезных ископаемых MEPHySTo [7]. Мы демонстрируем методологию в двух районах, различающихся по геологии, климату и научным целям. Первый район расположен в арктической среде, где два гиперспектральных скана, полученных с разных точек обзора, используются для обнаружения и картирования минералогических вариаций в составе мраморов формации Марморилик в Западной Гренландии. Полученная карта интегрируется с фотограмметрическими данными для обеспечения пространственного контекста и 3D-вида, который может быть интегрирован в 3D-моделирование. Второй набор данных был получен на ныне заброшенном открытом карьере Корта Аталая недалеко от Минас-де-Риотинто, Испания. Испанский набор данных демонстрирует применимость скорректированного набора данных для картирования зон изменений массивного сульфидного месторождения в жарких и пыльных условиях, а также возможность интеграции наборов данных, полученных в разное время.
2. Районы исследований
2.1. Полуостров Нуннгарут, Маарморилик, Гренландия
Первый район исследований расположен в центральной части Западной Гренландии, в районе фьорда Уумманнак и Каррат-Ис-фьорда (Рисунок 1). Исследуемая территория охватывает большие части полуострова Нуннгарут у фьорда Каамаруюк, где расположен бывший шахтерский городок Маарморилик. Находящееся поблизости месторождение свинца и цинка Блэк Энджел отделено от полуострова Нуннгарут меньшим фьордом Аффарликассаа. Район исследований относится к формации Марморилик, карбонатно-доминируемой толще пород мощностью 1600 м, представляющей собой самую южную стратиграфическую часть палеопротерозойской группы Каррат [21]. Она была отложена между 2,1 и 1,9 млрд лет назад в эпиконтинентальном окраинном бассейне в виде платформенных карбонатов [21], несогласно залегает на комплексе сильно деформированных архейских ортогнейсов и перекрыта метаосадочными породами флишевого типа формации Нукавсак [22].
Формация Марморилик в нижней части представлена в основном доломитовыми мраморами, а в верхней части - кальцитовыми мраморами. Местами встречаются переслаивающиеся горизонты кварцитов, тремолитовых мраморов и возможных метаморфизованных эвапоритов в виде ангидрита [21,23]. Свинцово-цинковое месторождение типа «долина Миссисипи» (MVT) Блэк Энджел залегает в пределах формации Марморилик [22,24], вызывая наложение на мраморы базальных рассолов. Вся последовательность архейского фундамента и группы Каррат была сильно смята в складки и надвинута в результате наггсугтокидианско-ринкианского орогенеза. Во время этого орогенеза формация Марморилик испытала по меньшей мере три фазы деформации [19], что привело к перекристаллизации и метаморфизму в условиях высокой зеленосланцевой и амфиболитовой фаций [25]. Формация Марморилик интерпретируется как латеральный эквивалент формации Каарсукассак [26], и вместе они образуют перспективный регион для цинковой минерализации площадью в несколько сотен квадратных километров [19,27].
2.2. Корта Аталая, Риотинто, Испания
Корта Аталая, недалеко от Минас-де-Риотинто в провинции Уэльва (южная Испания), является, при размерах 1200×900"м" и максимальной глубине 365"м" , одним из самых известных открытых карьеров горнорудного района Риотинто (Рисунок 1). Вулканогенная колчеданная минерализация Риотинто связана с Иберийским пиритовым поясом, который считается вмещающим крупнейшую концентрацию массивных сульфидов в земной коре [28]. ИПП расположен в вергентном на север складчато-надвиговом поясе поздневарисцийского возраста [29], простирающемся от востока Сетубала (Португалия) до севера Севильи (Испания), и интенсивно разрабатывался на медь, марганец, железо и золото, начиная с бронзового века. В Риотинто литостратиграфическую последовательность можно разделить на три единицы (снизу вверх): (i) филлиты и кварциты; (ii) сланцы, силлы базальтов, кислые вулканиты (риолиты и дациты); и (iii) так называемая кульмская серия (граувакки и сланцы). Стратиформные линзы колчеданов залегают в кислых вулканитах верхнедевонского-нижнекаменноугольного возраста [28]. С массивной сульфидной минерализацией связаны зоны хлоритовой и аргиллитовой переработки. Зоны штокверка залегают под линзами вблизи разломов [28]. Госсан обычно образуется в покрывающих породах над месторождением. Само месторождение Риотинто находится в замке антиклинали, простирающейся в направлении В-З, с осью складки, погружающейся на восток. Корта Аталая расположена на южном крыле этой так называемой антиклинали Риотинто. Штокверковые и массивные рудные тела связаны с надвигами, простирающимися в направлении В-З. Набор более поздних поперечных разломов северо-западного-юго-восточного простирания смещает антиклиналь Риотинто. Самый заметный из этих разломов, Фалья Эдуардо, смещает массивное сульфидное тело Сан-Дионисио примерно на 150"м" к югу и продолжается в рудном теле Филон Сур к востоку от Корта Аталая [28]. Массивное сульфидное тело Сан-Дионисио, которое разрабатывалось в Корта Аталая, изначально имело запасы 100 миллионов тонн. Первоначально рудник был предназначен для добычи сульфидов железа и меди (в основном пирита с меньшими количествами халькопирита). Первоначальной целью было извлечение меди из сульфидов меди, но впоследствии сера, содержащаяся в пирите, использовалась для производства серной кислоты до окончательного закрытия карьера в 1991 году [28].
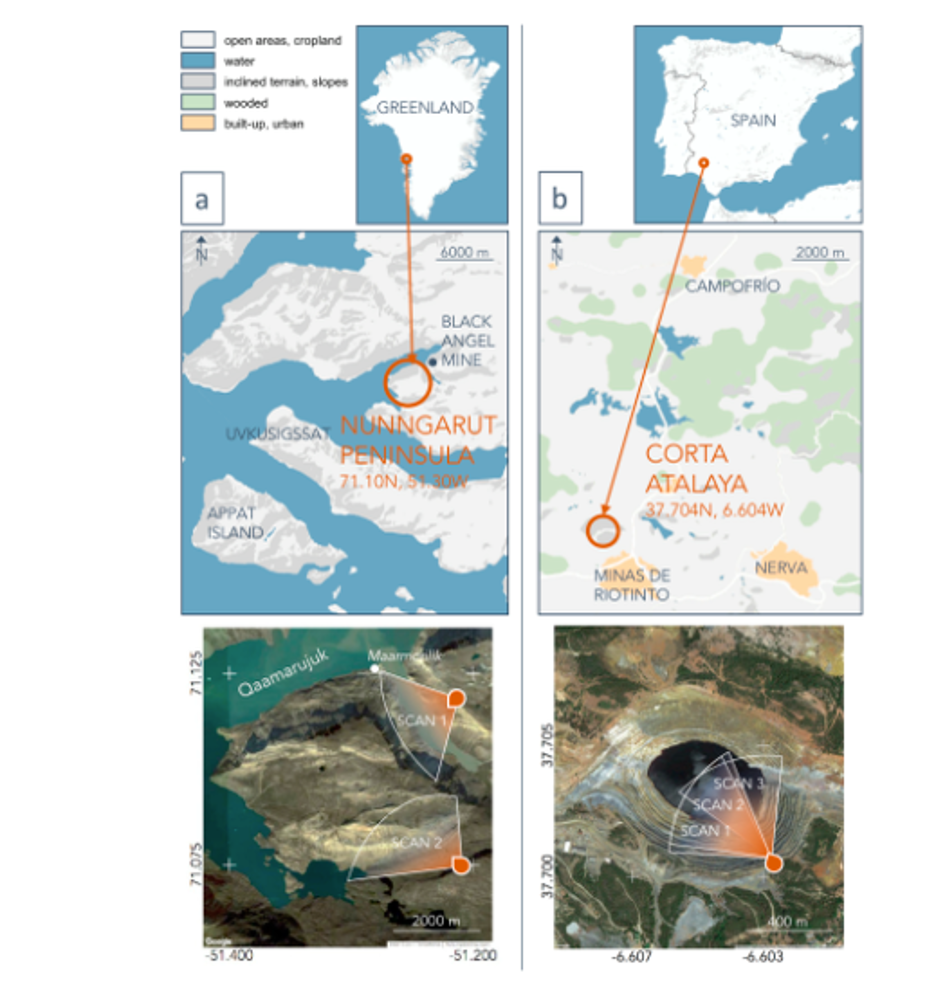
Рисунок 1. Расположение двух исследуемых участков и схематическое покрытие гиперспектральной съемки AisaFENIX: (a) полуостров Нуннгарут, Маарморилик, Гренландия; и (b) открытый карьер Корта Аталая, Минас-де-Риотинто, Испания.</center>
3. Сбор данных
3.1. Гиперспектральная съемка
Данные гиперспектральных изображений были получены с использованием сканера щелевого типа SPECIM AisaFENIX. Сканер имеет 384 пикселя в строке (swath pixels) с 624 спектральными каналами каждый, покрывающими диапазон от видимого и ближнего инфракрасного до коротковолнового инфракрасного между 380 и 2500 нм. Спектральное разрешение (полная ширина на половине максимума — FWHM) варьируется от 3,5 нм в ВНК до 12 нм в КВК при спектральном интервале дискретизации около 1,5"нм" (ВНК) и 5"нм" (КВК) соответственно. Устанавливая прибор на поворотный столик, можно было получить непрерывное гиперспектральное изображение с вертикальным полем обзора 32,3^∘ и максимальным углом сканирования 130^∘ за одно измерение. Во время измерений регистрировались GPS-позиция камеры, время съемки и общее направление обзора (далее именуемое 'угол камеры') скана. Рядом с камерой в пределах поля обзора и с примерно такой же общей ориентацией, как у снимаемого обнажения, устанавливалась белая эталонная панель Spectralon SRS-99.
3.2. Фотограмметрические данные / 3D-данные
Изображения для реконструкции геометрии поверхности были записаны с использованием предварительно откалиброванных RGB и гиперспектральных камер. В случае Маарморилика использовалась камера Nikon D800E с объективом Zeiss 35"мм" 1.4 с вертолета. 3D-облако точек Корта Аталая было получено на основе слияния изображений с дрона: гиперспектральной камеры Rikola (красный канал) и камеры Canon EOS M с объективом EF-M 22"мм" f/2 STM (в виде полутонового изображения). Позиции камер были получены с прикрепленного GPS-устройства, в то время как геометрия съемки была реконструирована с использованием рабочего процесса «Структура из движения» (SfM) и многовидовой стерео (MVS). Перед выполнением фотограмметрического рабочего процесса искажения изображений были устранены.
3.3. Валидационные пробы
Для валидации рабочего процесса коррекции и результатов минерального картирования были взяты образцы основных литологий. Местоположения образцов регистрировались с помощью портативного GPS-устройства. Спектры представительных свежих и измененных поверхностей горных пород были получены in situ с использованием портативного спектрорадиометра Spectral Evolution PSR-3500 с контактным зондом (размер пятна 8 мм) со встроенным искусственным источником света. Его спектральное разрешение составляет 3,5"нм" (интервал дискретизации 1,5 нм) в ВНК и 7"нм" (интервал дискретизации 2,5 нм) в КВК, что дает 1024 канала в спектральном диапазоне от 350 до 2500"нм" . Значения излучения были преобразованы в коэффициенты отражения с использованием калиброванной PTFE-панели с коэффициентом отражения >99% в ВНК и >95% в КВК (либо Spectralon SRS-99, либо Zenith Polymer). Каждая спектральная запись состояла из 10 отдельных измерений, которые выполнялись последовательно, а затем усреднялись.
4. Рабочий процесс обработки
4.1. Предварительная обработка гиперспектральных сырых данных
Полученные сырые гиперспектральные наборы данных сначала преобразуются в излучение на сенсоре с помощью вычитания темнового тока, с последующей нормализацией изображения и умножением на сенсорные и спектрально-специфичные данные радиометрической калибровки (Рисунок 2). На втором этапе необходимо применить две геометрические коррекции специфических оптических искажений сенсора. Первый эффект — это искажение вдоль поля обзора, сравнимое с искажением объективов типа «рыбий глаз». Это приводит к увеличивающемуся укорочению изображения от центра к верхним и нижним границам изображения. Второй эффект можно описать как изгиб щели и относится к искривленной записи текущей сканируемой (прямой) линии. Оба эффекта могут быть устранены путем применения значений коррекции для каждого пикселя в поле обзора. Необходимые параметры включены в справочную таблицу, предоставляемую производителем сенсора. В случае, если несколько сканов одной и той же сцены были получены с одинаковыми настройками, на этом этапе можно выполнить суммирование и усреднение этих сцен. Путем суммирования изображений можно увеличить отношение сигнал/шум, уменьшив возможные временные вариации освещения из-за изменения облачности.
4.2. Радиометрическая коррекция гиперспектральных данных излучения
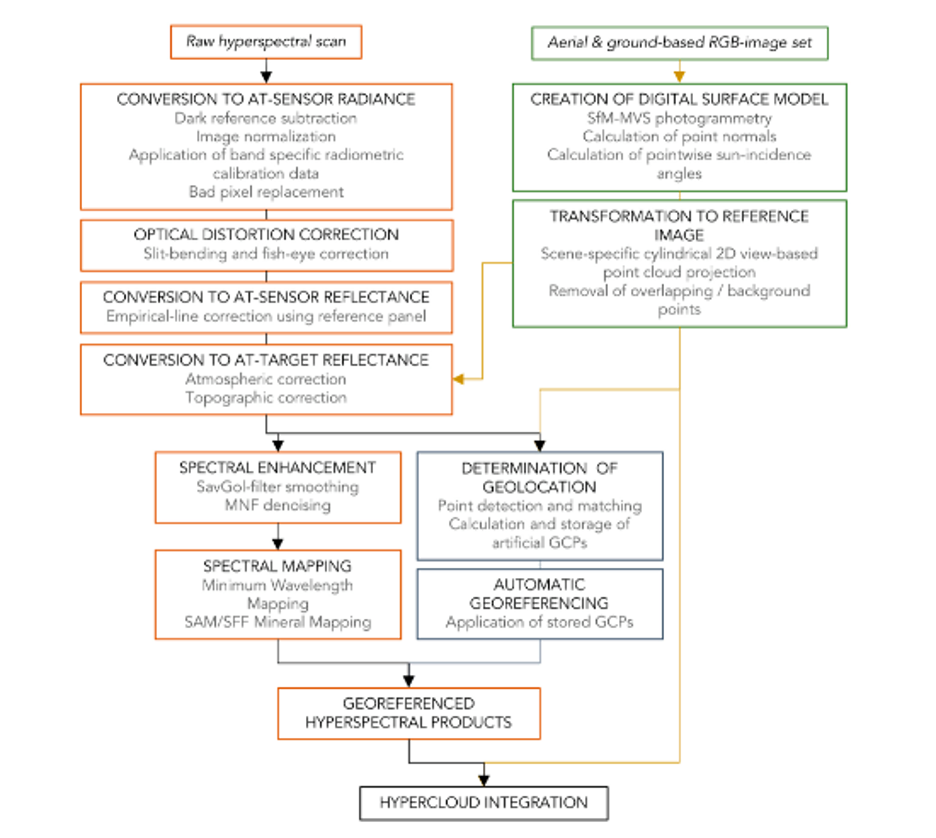
Рисунок 2. Схема рабочего процесса коррекции, обработки и 3D-интеграции наземных гиперспектральных изображений дальнего диапазона.</center>
4.2. Радиометрическая коррекция гиперспектральных данных излучения
После преобразования сырых гиперспектральных данных в излучение необходимо выполнить преобразование в коэффициент отражения на сенсоре, что может быть достигнуто с использованием белого эталонного щитка, размещенного рядом с сенсором. Этот эталонный щит Spectralon (SRS-99) близок к идеальному ламбертовскому отражателю с коэффициентом отражения >99% в ВНК и >95% в КВК.
Его точный спектр отражения известен и может быть использован для эмпирической линейной коррекции данных излучения. При этом для каждого канала рассчитывается и применяется линейная регрессия между значениями излучения на изображении и эталонными значениями коэффициента отражения.
В зависимости от расстояния съемки и климатических условий, результирующее изображение коэффициента отражения на сенсоре все еще может содержать атмосферные искажения (см. Рисунок 3). В отличие от авиационных или космических данных, можно предположить, что специфичный для сцены промежуточный атмосферный слой имеет однородный состав с лишь незначительными вариациями. Тем не менее, величина атмосферного влияния варьируется для каждого пикселя и зависит главным образом от расстояния между сенсором и объектом, но также может зависеть от локальных вариаций, например, разной интенсивности восходящего водяного пара.
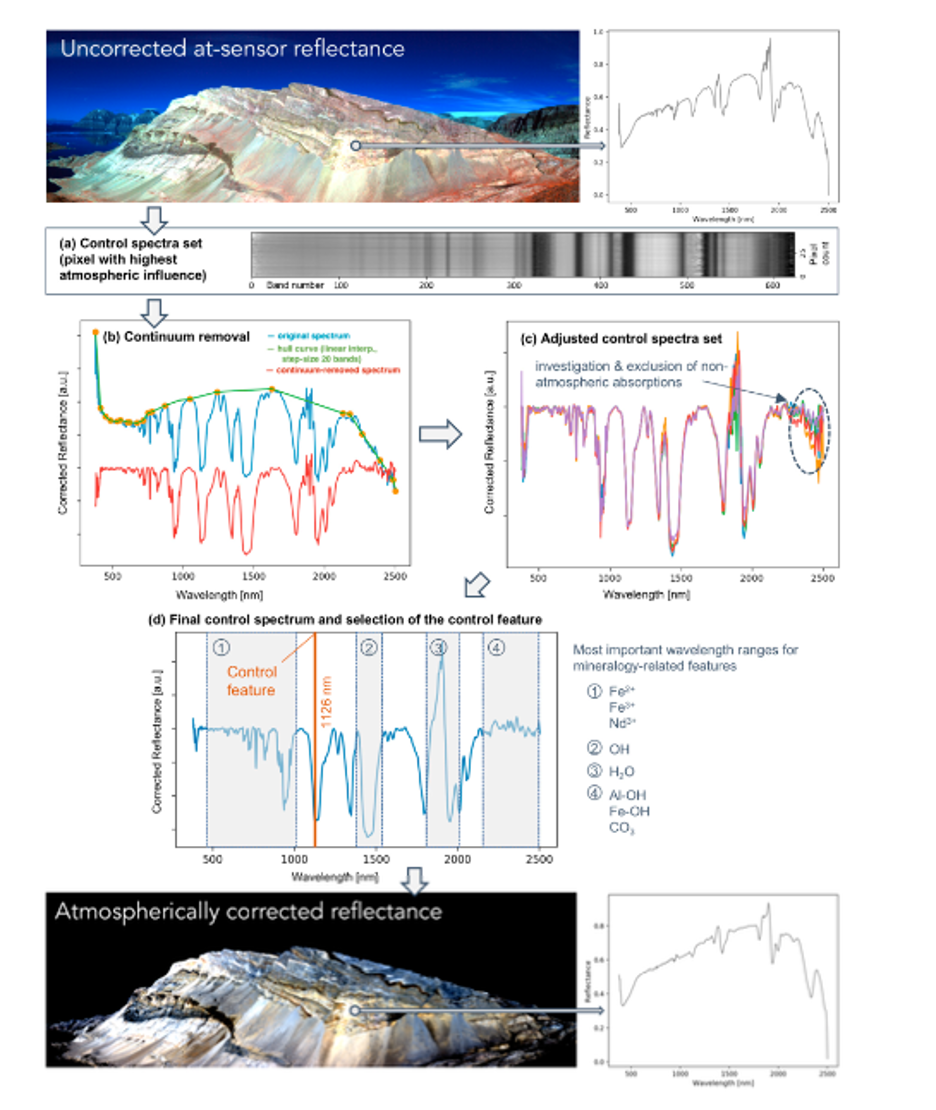
Рисунок 3. Рабочий процесс атмосферной коррекции на примере мраморных утесов Маарморилик (Нуннгарут, Скан 2). Гиперспектральные изображения отображаются с использованием спектральных истинно-цветных репрезентативных каналов (R: 640 нм G: 550 нм B: 470 нм). Подробное описание см. в тексте. (a) Набор контрольных спектров; (b) удаление континуума; (c) скорректированный набор контрольных спектров; (d) итоговый контрольный спектр и выбор контрольного признака.
Учитывая эти обстоятельства, мы пытаемся выполнить радиометрическую коррекцию для удаления атмосферных искажений, используя единый спектр атмосферной коррекции для каждой сцены. Интенсивность коррекции необходимо изменять в соответствии с величиной атмосферного искажения. Чтобы подход коррекции был надежным и независимым от дополнительных параметров или знаний о составе влияющего атмосферного слоя, спектр атмосферной коррекции получается непосредственно и автоматически из самого гиперспектрального и зображения. При этом корректирующий спектр является всеобъемлющим представлением всех обильных в сцене спектрально влияющих атмосферных компонентов, которые могут включать атмосферную пыль, водяной пар и другие атмосферные газы. Корректирующий спектр не является селективным и не ограничивается определенными компонентами и, таким образом, применим для любых атмосферных условий.
Благодаря предполагаемому постоянному составу атмосферы над сценой, глубины всех связанных с атмосферой признаков должны изменяться одинаково при изменении атмосферного влияния. Этот подход позволяет нам оценить величину атмосферного влияния для каждого пикселя по глубине только одного атмосферного абсорбционного признака и устраняет необходимость в атмосферных моделях, дополнительных калибровочных целях и измерениях расстояния. Этот, названный нами, контрольный признак должен быть как общим для всех возможных встречающихся атмосферных составов, так и достаточно сильным, чтобы быть обнаружимым даже при слабом атмосферном влиянии. Кроме того, он не должен перекрываться с какими-либо характерными признаками, связанными с минералогией, чтобы избежать интерференции и некорректной коррекции. Полоса поглощения, которая, как мы обнаружили, лучше всего удовлетворяет этим условиям, находится на 1126 нм (Рисунок 3d) и связана с атмосферным водяным паром [14].
Рабочий процесс атмосферной коррекции состоит из нескольких этапов, которые также можно проследить на Рисунке 3:
- Маскировка пикселей, относящихся к небу: Все пиксели изображения, представляющие небо и небо, отраженное зеркальными поверхностями, такими как вода, автоматически маскируются из изображения коэффициента отражения с использованием отношения между каналами изображения, расположенными на 410 и 890 нм. Эти длины волн выбраны так, чтобы охватить два конца экстремального спада в ВНК отражения, который характерен для спектров неба. Эта характерная форма приводит к обычно очень отчетливой разнице в отношении между пикселями неба и не-неба. В наших примерах порог маскировки был наиболее успешным в диапазоне отношений от 1,0 до 2,0.
- Определение и обработка возможных корректирующих спектров: Глубина контрольного признака на 1126 нм рассчитывается для всех оставшихся пикселей. Все спектры пикселей с глубиной контрольного признака в пределах 80-100%от максимальной извлекаются как набор контрольных спектров (Рисунок 3а), который будет использован для определения итогового спектра атмосферной коррекции. Для каждого спектра из набора отдельно применяются удаление континуума и выравнивание глубины контрольного признака. Соответствующая огибающая континуума рассчитывается с использованием линейной интерполяции последовательно получаемых максимумов по всему соответствующему спектру (Рисунок 3b). Скользящее окно для расчета огибающей континуума может быть либо установлено с фиксированным размером шага, либо ограничено конкретными сохраненными диапазонами длин волн, которые находятся вне или на краю известных окон атмосферного поглощения.
- Исключение неатмосферных признаков: Некоторые спектры результирующего выровненного набора контрольных спектров могут все еще содержать дополнительные неатмосферные поглощения. Эти признаки следует исключить из корректирующего спектра, чтобы избежать ослабления или удаления важных минералогических признаков в процессе атмосферной коррекции. В отличие от атмосферных признаков, неатмосферные поглощения встречаются с разной интенсивностью и только в спектральном подмножестве контрольных спектров (Рисунок 3c, d). Их можно исключить из набора контрольных спектров, сохраняя только наивысшие из всех спектральных значений для каждой длины волны. При необходимости используемый порог можно изменять вручную.
- Расчет и применение итогового контрольного спектра: Оставшаяся спектральная информация усредняется для каждой длины волны для уменьшения возможного шума. Результатом всей процедуры является единый скорректированный на континуум корректирующий спектр, содержащий исключительно характерный атмосферный вклад анализируемого гиперспектрального изображения (Рисунок 3d). Сама атмосферная коррекция выполняется попиксельно. Для каждого пикселя интенсивность корректирующего спектра должна быть скорректирована как по глубине, так и по значению отражения контрольного признака в спектре пикселя. Сама коррекция затем достигается простым делением спектра пикселя на скорректированный корректирующий спектр. В ходе этого процесса исходные интенсивности отражения в скорректированных спектрах изображения сохраняются.
Время обработки для автоматической коррекции гиперспектрального скана с пространственными и спектральными размерами, как в наших примерах, составляет менее одной минуты. Таким образом, метод является чрезвычайно экономичным по времени и усилиям и может быть легко интегрирован в пакетный рабочий процесс.
В зависимости от отношения сигнал/шум обрабатываемого набора данных, последующее сглаживание с использованием минимальной доли шума может быть полезным. Сглаживание MNF включает преобразование изображения в пространство MNF, отбрасывание каналов с низким SNR и последующее обратное преобразование в исходное пространство изображения [30]. Количество каналов MNF, которые следует отбросить, можно определить, взглянув на функцию собственных значений рассчитанных каналов MNF, которая достигает плато после резкого увеличения, и предполагает отбрасывание, если асимптотическая функция собственных значений приближается к линейной функции [31].
4.3. SfM-MVS Фотограмметрия
Цифровая модель поверхности создается на основе аэрофотоснимков и наземных изображений с использованием алгоритмов «Структура-из-движения» и многовидовой стерео в Agisoft Photoscan Professional 1.2.5. SfM-MVS — это недорогой, удобный для пользователя рабочий процесс, объединяющий фотограмметрические методы, 3D-компьютерное зрение и обычные методы геодезической съемки. Он автоматически решает уравнения для положения камеры и геометрии сцены, используя высокоизбыточную пучковую регулировку [32,33]. Типичный рабочий процесс SfM-MVS для создания итоговой модели поверхности состоит из следующих восьми этапов [33,34]:
- Обнаружение характерных точек изображения;
- Автоматическое сопоставление точек с использованием гомологичного преобразования;
- Фильтрация ключевых точек — этот этап критически важен для точности модели и валидации последующих результатов [35];
- Итеративная пучковая регулировка для реконструкции геометрии съемки и внутренних параметров камеры;
- Масштабирование и геопривязка внутренней системы координат к доступным опорным точкам (GCP) или координатам камеры и оптимизация полученного разреженного облака;
- Применение алгоритмов многовидовой стерео (плотное сопоставление) для вычисления плотного облака — результирующее плотное облако является основой для геометрической коррекции гиперспектральных данных;
- Интерполяция плотного облака, например, построением сетки или методом обратно взвешенных расстояний, для получения цифровой модели поверхности;
- Текстурирование 3D-модели.
4.4. Расчет углов падения солнца для топографической коррекции
Знание угла падения солнца для каждого пикселя гиперспектрального изображения имеет решающее значение для его топографической коррекции. В отличие от надирных данных, сканы вертикальных обнажений могут содержать несколько пикселей, расположенных в любой заданной координате широты/долготы, которые можно пространственно различать только по их значениям высоты. Поэтому обычные инструменты для расчета уклона, экспозиции и угла падения солнца по цифровым моделям рельефа здесь неприменимы. Вместо этого мы вычисляем угол падения солнца для каждой отдельной точки облака точек, созданного в Разделе 4.3, как угол между нормалью точки и вектором на солнце (Рисунок 4а). Нормали точек либо вычислялись во время построения облака точек, либо могут быть вычислены ретроспективно с использованием триангуляции соседних точек. Вектор на солнце характеризуется формулой
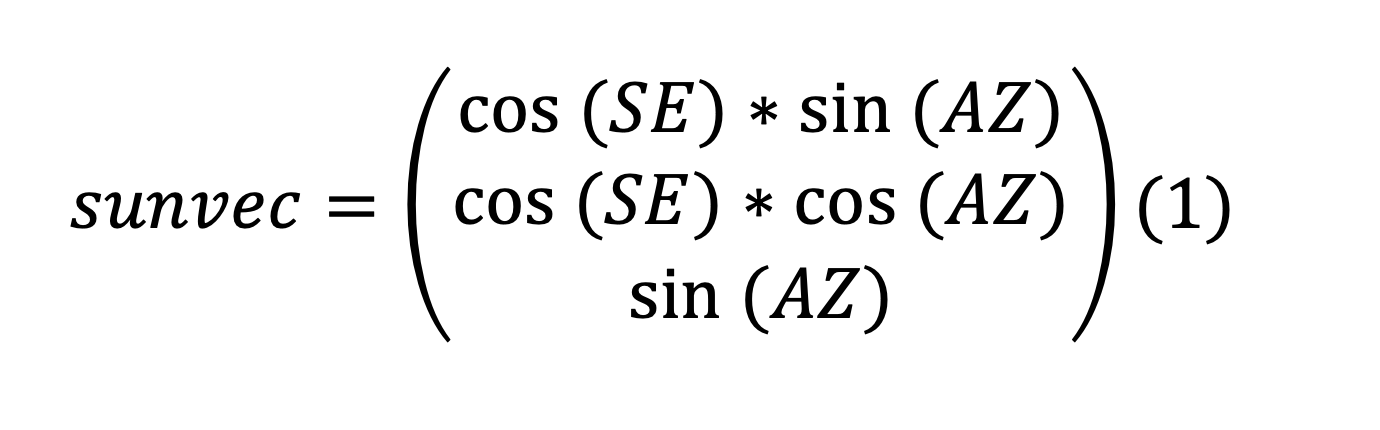
где SE — угол возвышения солнца, а AZ — азимут солнца на заданную дату, время и позицию съемки. Вычисленные углы падения солнца сохраняются как дополнительные свойства точек в файле облака точек и сохраняются на всех последующих этапах обработки.
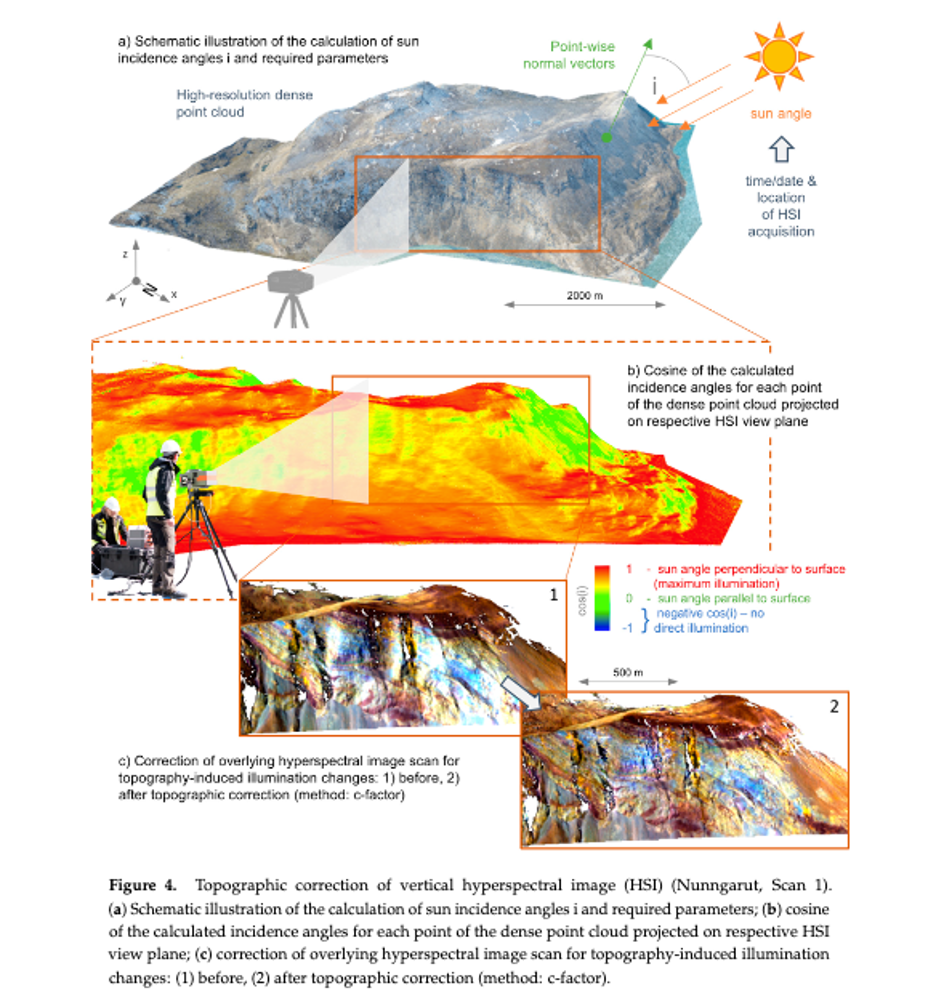
Рисунок 4. Топографическая коррекция вертикального гиперспектрального изображения (Нуннгарут, Скан 1). (a) Схематическая иллюстрация расчета углов падения солнца i и необходимых параметров; (b) косинус вычисленных углов падения для каждой точки плотного облака точек, спроецированных на соответствующую плоскость обзора ГСИ; (c) коррекция наложенного гиперспектрального скана на изменения освещения, вызванные рельефом: (1) до, (2) после топографической коррекции (метод: c-factor).</center>
4.5. Проекция облака точек и сопоставление с ГСИ
Для топографической коррекции и окончательного создания 3D-гипероблака необходима интеграция 2D-гиперспектральных данных и 3D-данных облака точек. Чтобы облегчить автоматическое сопоставление и уменьшить искажения в последующем процессе обертывания (wrapping), облако точек проецируется на 2D-поверхность таким образом, чтобы оно напоминало вид гиперспектральной камеры во время съемки изображения. Здесь крайне важно, чтобы на протяжении всего процесса последующих преобразований исходные координаты каждой точки облака сохранялись как дополнительные параметры. Из-за щелевого характера сенсора простая ортогональная проекция облака точек на плоскость не подходит. Вместо этого облако точек сначала преобразуется так, чтобы положение камеры устанавливалось как новое начало координат, а угол обзора камеры устанавливался вдоль оси y
системы координат с помощью "Преобразованные точки"="Исходныеточки"-"Положениекамеры"*(-"Уголкамеры").(2)
Пространственная связь между облаком точек, углом камеры и положением камеры в преобразованной системе координат показана на Рисунке 5.
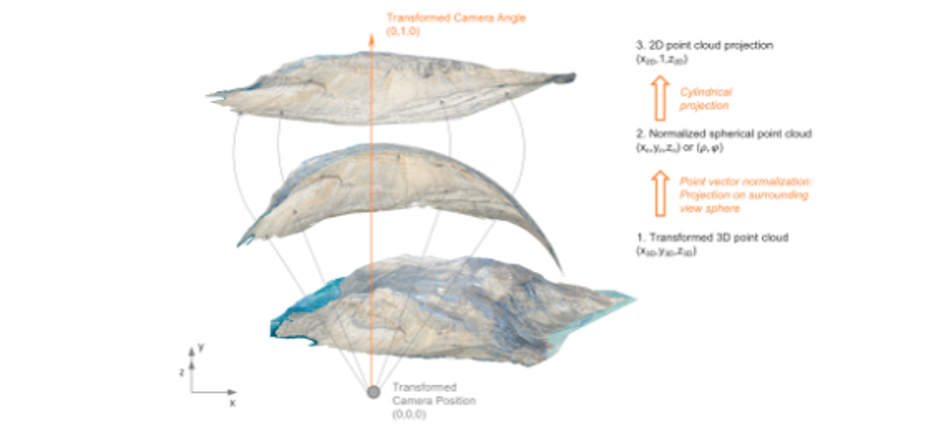
Рисунок 5. Схема рабочего процесса преобразования и проекции облака точек для создания 2D-изображения, напоминающего панорамный вид сканера щелевого типа (Нуннгарут, Скан 2).</center>
Каждая координата точки преобразованного облака точек теперь соответствует вектору между преобразованным положением камеры в (0,0,0) и точкой в (x3D,y3D,z3D ).
Если предположить, что поле обзора камеры является подмножеством виртуальной окружающей сферы обзора с центром в положении камеры, облако точек может быть спроецировано на эту сферу путем нормализации каждого вектора точки по формуле
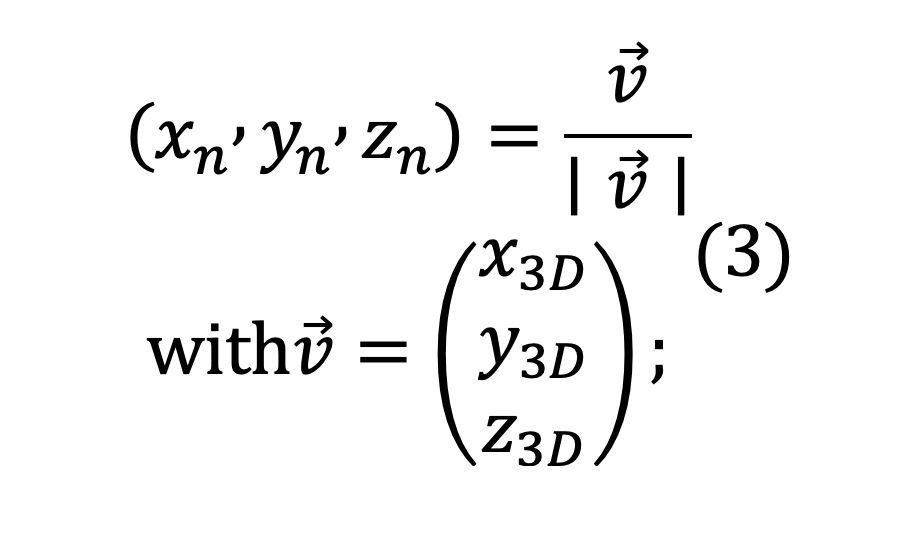
см. также Рисунок 5b.
Спроецированное облако точек теперь разворачивается на 2D-плоскость с использованием цилиндрической проекции:
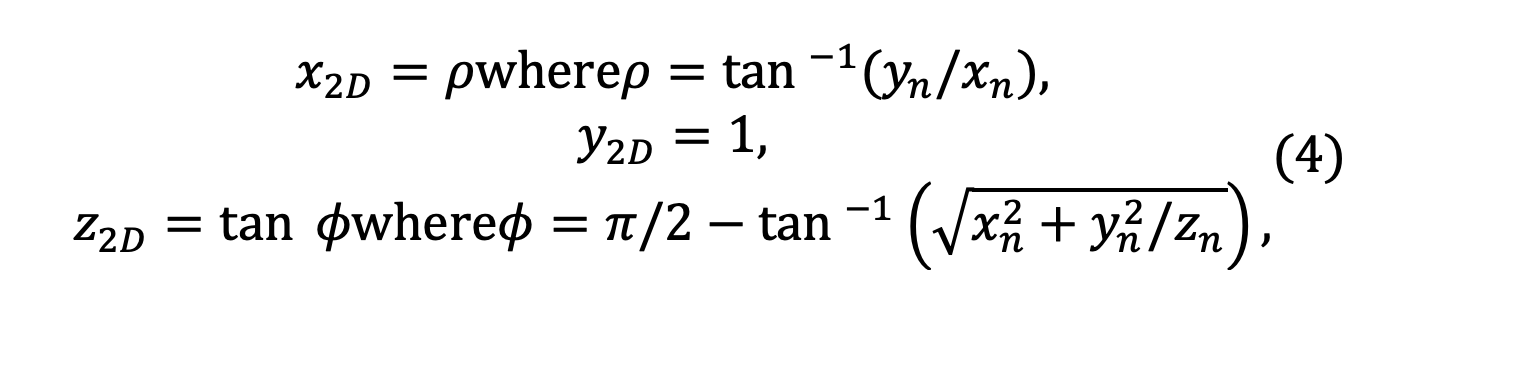
где x2D и y2D
— декартовы координаты созданного 2D-изображения, а xn,yn,zn или ρ и ϕ
— декартовы или сферические координаты нормализованного 3D-облака точек соответственно (Рисунок 5c). Угол, под которым цилиндр разрезается для проекции, может быть задан дополнительным параметром.
Проекция в 2D-пространство учитывает все точки на истинной линии визирования гиперспектральной камеры, что включает точки, скрытые за точками на переднем плане (передние точки), такие как обратная сторона горы (задние точки). Это приводит к артефактам в созданном 2D-изображении (см. Рисунок 6а) и отрицательно повлияет на последующие этапы обработки. Используя максимальный порог для исходного пространственного расстояния между соседними точками, эти нежелательные задние точки могут быть удалены. Для обеспечения быстрой обработки даже для огромных облаков точек используется скользящее окно для одновременной обработки нескольких точек. Для каждого применяемого окна находится точка, содержащаяся в нем, с наименьшим расстоянием до положения камеры. Это расстояние может быть вычислено по исходным координатам облака точек, которые все еще сохранены как дополнительные параметры точки. При этом выгодно использовать только ту ось исходных координат, которая была ближе всего к исходному углу камеры. В то время как соседние передние точки показывают схожее местоположение с разницей обычно от дециметров до нескольких метров (в зависимости от пространственной точности данных), задние точки в основном имеют местоположения далеко, с расстояниями в несколько десятков или сотен метров от ближайшей к камере передней точки. В соответствии с этим порог устанавливается, и все результирующие задние точки удаляются (Рисунок 6b). Из-за характера этого рабочего процесса меньший размер окна гарантирует более высокую точность, но также и большее время вычислений.
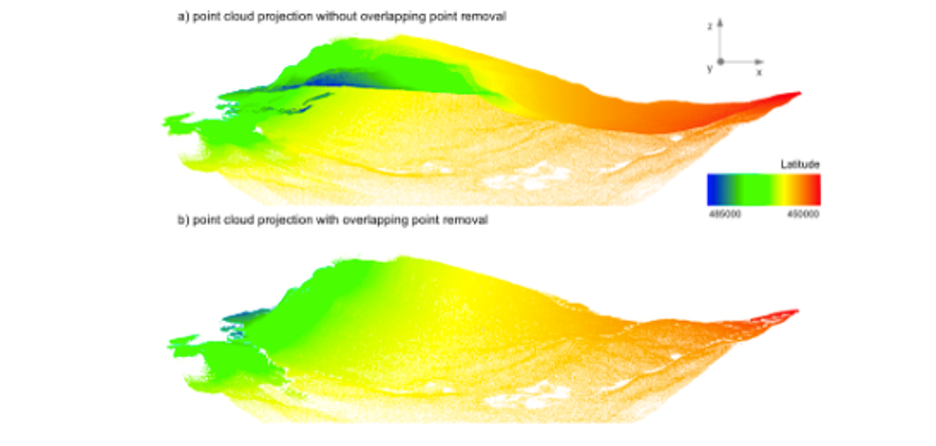
Рисунок 6. Влияние удаления перекрывающихся точек на качество 2D-изображения проекции облака точек на примере Нуннгарут, Скан 2. Исходная \(x\)-координата точек показана цветовым градиентом. (a) Проекция облака точек без удаления перекрывающихся точек; (b) проекция облака точек с удалением перекрывающихся точек.</center>
После удаления мешающих задних точек оставшиеся передние точки интерполируются в растр с пространственным разрешением, аналогичным или немного более высоким, чем пространственное разрешение гиперспектральных данных. Помимо информации о цвете RGB, это орто-изображение имеет четыре дополнительных канала, содержащих исходные координаты облака точек и вычисленные углы падения солнца. Созданный RGB-растр теперь может быть использован для автоматической ко-регистрации гиперспектрального изображения. Рабочий процесс сопоставления, используемый для ко-регистрации, будет частью инструментария MEPHySTo, представленного в Jakob et al. [7], и также успешно адаптирован и используется для интеграции судовых гиперспектральных данных и 3D-облаков точек в сопроводительной статье [20]. Рабочий процесс основан на алгоритме SIFT (масштабно-инвариантная трансформация признаков) [36], который из обоих изображений извлекает локальные признаки или ключевые точки, инвариантные к переносу, повороту и масштабу и частично инвариантные к аффинным или 3D-проекциям и изменениям освещения. Используя библиотеку алгоритмов FLANN (быстрая библиотека для приблизительного поиска ближайших соседей) [37], находятся коррелирующие пары точек между обоими наборами ключевых точек. Наилучшим образом сопоставленные пары точек используются в качестве контрольных точек для полиномиального «обертывания» (warping) гиперспектрального изображения, чтобы оно соответствовало RGB-растру. После ко-регистрации каждая перекрывающаяся точка обоих наборов данных содержит высокоразрешенные спектральные данные, географическое положение и высоту, а также угол падения солнца на момент съемки.
4.6. Топографическая коррекция привязанного ГСИ
Топографическая коррекция аналогична подходу, описанному в Jakob et al. [7]. Основное отличие заключается в расчете специфичных для пикселя углов падения солнца, который описан выше в Разделе 4.4. Вычисленные углы теперь могут быть использованы для применения алгоритма топографической коррекции. Метод c-factor дал наилучшие результаты коррекции среди всех методов, реализованных в инструментарии, и позволил достичь очень плавной и точной коррекции даже при больших различиях в освещении (см. Рисунок 4c). Топографически скорректированное изображение вычисляется по формуле
где с равно a/m из линейной регрессии ref0=a+m*IL и IL=cos(i) [38].
Подход c-factor применяется отдельно для каждого спектрального канала. Коррекция обычного гиперспектрального скана обычно занимает меньше минуты. Для очень темных и глубоко затененных областей изображения пиксели могут быть чрезмерно скорректированы. Эти пиксели характеризуются экстремальными, вплоть до бесконечных значений, которые явно превышают обычный диапазон значений данных отражения. Пораженные пиксели обнаруживаются и маскируются с использованием соответствующих порогов, которые устанавливаются в соответствии с минимумом и максимумом спектрального отражения топографически не скорректированного изображения (например, 0 и 1).
4.7. Картирование по положению минимума поглощения
Окончательно скорректированное ГСИ теперь может быть использовано для последующего картирования и интерпретации. В настоящей статье подход картирования по положению минимума поглощения используется в качестве примера для проверки качества и применимости данных для минерального картирования.
MWL-картирование с использованием Wavelength Mapper [39,40] направлено на оценку положения самого глубокого абсорбционного признака в заданном диапазоне длин волн. Положение минимума поглощения является ключом к связыванию минералогии поверхности с тонкими вариациями в минеральном составе (например, сдвиг признака Al-OH в зависимости от координации Al). Сначала вычисляется огибающая кривая (hull curve) и производится деление спектров на нее. Во-вторых, положение и глубина наиболее выраженного поглощения вычисляются с использованием полиномиальной функции второго порядка. Эти два параметра могут быть использованы для создания карт положения MWL, где положение исследуемого признака отображается изменением цвета, в то время как интенсивность цвета контролируется глубиной поглощения.
Успех подхода MWL-картирования критически зависит от анализа тонких изменений положения и глубины в основном небольших минералогических абсорбционных признаков. Поэтому это отличная возможность оценить методы коррекции изображений, которые влияют как на соотношение интенсивностей между отдельными пикселями изображения (топографическая коррекция), так и на форму самого спектра (радиометрическая и атмосферная коррекция). В этом контексте успешное удаление искажений так же важно, как и сохранение существующих и реальных соотношений интенсивностей и спектральных признаков.
4.8. Создание гипероблаков
В конце описанного выше рабочего процесса каждый пиксель ГСИ (и любой продукт картирования ГСИ) имеет присвоенные географическое положение и высоту через соответствующий пиксель в спроецированном и растеризованном 2D-облаке точек. Извлекая эту информацию для каждого пикселя спектрального растра, мы можем создать так называемое «гипероблако», которое визуализирует спектральные данные в виде 3D-облака точек. Отображаемые данные могут включать любые спектральные данные или результаты, такие как простые данные отражения, результаты декорреляции и методы картирования конечных элементов, или результаты MWL-картирования, представленные здесь. Гипероблако может быть отображено и обработано далее в соответствующем 3D-программном обеспечении, таком как CloudCompare (открытое ПО GPL, доступно по адресу http://www.cloudcompare.org/) или SKUA-GOCAD (Emerson/Paradigm, Хьюстон, США). Если гиперспектральная съемка состояла из нескольких сканов, покрывающих разные части наблюдаемой области, создание гипероблаков может быть отличным вариантом для помещения отдельных результатов картирования в пространственный контекст путем одновременного отображения или слияния нескольких гипероблаков. 3D-гипероблако также позволяет интегрировать с другими пространственными наборами данных, такими как скважины или структурные наблюдения.
5. Результаты
5.1. Полуостров Нуннгарут, Маарморилик, Гренландия
Два гиперспектральных скана были получены с двух разных точек сканирования, покрывающих большую часть южного и восточного побережий полуострова Нуннгарут (Рисунок 1а). Приблизительное расстояние между сенсором и наблюдаемым объектом составляло от 2 до 5 км.
для большинства пикселей изображения, относящихся к обнажению. Несмотря на в целом сухие и солнечные условия во время съемки, многочисленные резкие атмосферные абсорбционные признаки в спектральных данных (см. Рисунки 3 и 7) указывали на высокое влияние атмосферного слоя между сенсором и объектом. Рисунок 7 отображает известные основные атмосферные составляющие (в данном случае водяной пар, СО2,О2 и О3)
общего наблюдаемого атмосферного возмущения и результирующий расчетный спектр, использованный для коррекции. Мы демонстрируем, что представленный здесь подход радиометрической коррекции позволяет почти полностью удалить влияние атмосферы, в то время как типичные минерал-специфичные спектральные признаки формации Марморилик сохраняются. В результирующем атмосферно-скорректированном спектре объекта оставшиеся абсорбционные признаки несомненно относятся к характерным минеральным признакам. Помимо отчетливого карбонатного признака мраморов Марморилик, четко представлены характерные признаки AlOH и OH/H2 O.
Эти характерные поглощения связаны либо с обильным эвапоритовым гипсом и/или глинистыми минералами, происходящими из включений или близлежащих пелитовых горизонтов, которые, как известно, присутствуют в этой литологической единице.
Скан 1, снимающий обращенный на юг утес полуострова Нуннгарут, был прямо противоположен солнцу во время измерений и поэтому равномерно освещен. Напротив, Скан 2, полученный утром и обращенный к восточному побережью полуострова, имел большие различия в освещении, что сделало топографическую коррекцию критически важной для последующего процесса картирования (Рисунок 4c).
После успешного применения атмосферной и топографической коррекции к гиперспектральным кубам данных, эти кубы данных обеспечивают основу для характеристики минералогического состава карбонатов формации Марморилик, имеющей значение для разведочного картирования. Идентификация различных карбонатов по гиперспектральным данным возможна с использованием положения и глубины связанной с карбонатами полосы поглощения колебательных обертонов между 2310 и 2340 нм
[41]. В то время как чистый кальцит имеет поглощение около 2340 нм
, полоса поглощения чистого доломита находится на 2320 нм
. Связанные с карбонатами поглощения на еще более коротких длинах волн могут указывать на присутствие тремолита вместе с доломитом. Эта зависимость подтверждается спектроскопическим анализом репрезентативных образцов пород из формации Марморилик (Рисунок 8а). Элементный и минералогический состав образцов дополнительно подтверждены с помощью pXRF (портативный рентгенофлуоресцентный анализ) и анализа шлифов соответственно (см. Rosa et al. [19]; личное сообщение C.A. Partin). Из результатов pXRF были рассчитаны соответствующие отношения
Ca/Mg для четырех-шести точек измерений на каждом образце и сравнены с классификацией известняков и доломитов Чилингара [42]. Образец #SLA15 имел высокие отношения Ca/Mg между 31,2±0,7 и 619,3±13,7
и поэтому был бы классифицирован как кальцитовый известняк. Отношение образца #562032 находилось в диапазоне от 2,0±0,5 до 5,9±0,9 , что указывает на высокодоломитовый известняк или известковый доломит. Образец #562048 находится в диапазоне между доломитом и магнезиальным доломитом с низким отношением Ca/Mg между 1,0±0,1 и 2,0±0,1 [42].
Таким образом, простой подход MWL-картирования обеспечивает хорошее средство для различения этих различных карбонатных фаз в обнажении (Рисунок 9). Горизонты пелитов и некарбонатные породы, которые спектрально характеризуются очень слабыми или отсутствующими карбонатными признаками, были замаскированы с использованием порога, основанного на глубине MWL картированного карбонатного признака.
Контакт между верхней и нижней формациями Марморилик четко виден на восточном склоне Нуннгарут, так как нижняя формация Марморилик характеризуется доломитом, переслаивающимся с богатыми тремолитом горизонтами [43], тогда как верхняя формация Марморилик является кальцит-доминируемой. Также прослеживается доломитизация вдоль разломов.
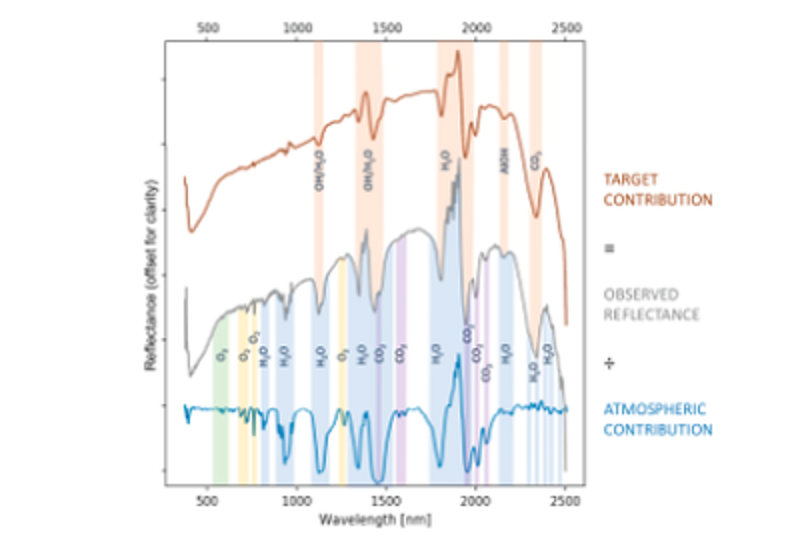
Рисунок 7. Вклад геологического объекта и атмосферы в примерный наблюдаемый спектр отражения (район исследований Нуннгарут, формация Марморилик). При этом вклад объекта равен спектру отражения после атмосферной коррекции.
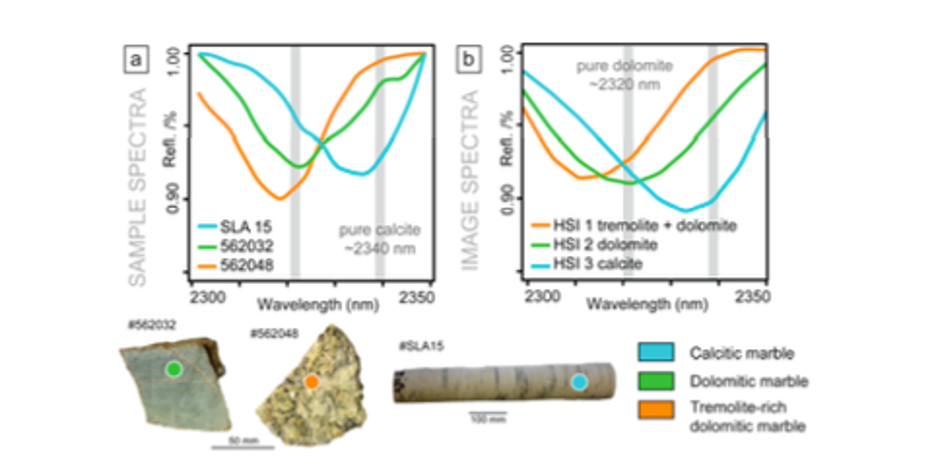
Рисунок 8. Спектральная валидация картирования состава карбонатов на основе положения минимума поглощения на тестовом участке Нуннгарут. (a) Лабораторные точечные спектры трех карбонатных образцов формации Марморилик, представляющих типичные конечные члены: кальцит, доломит и богатый тремолитом доломит; (b) График спектров ГСИ позиций отбора проб, отмеченных на Рисунке 9, представляющих конечные члены сцены: богатый кальцитом, доломитом и тремолитом доломит. Ко всем спектрам было применено удаление континуума. Элементный и минералогический состав дополнительно подтверждены с помощью портативного РФА и анализа шлифов соответственно (см. Rosa et al. [19]).
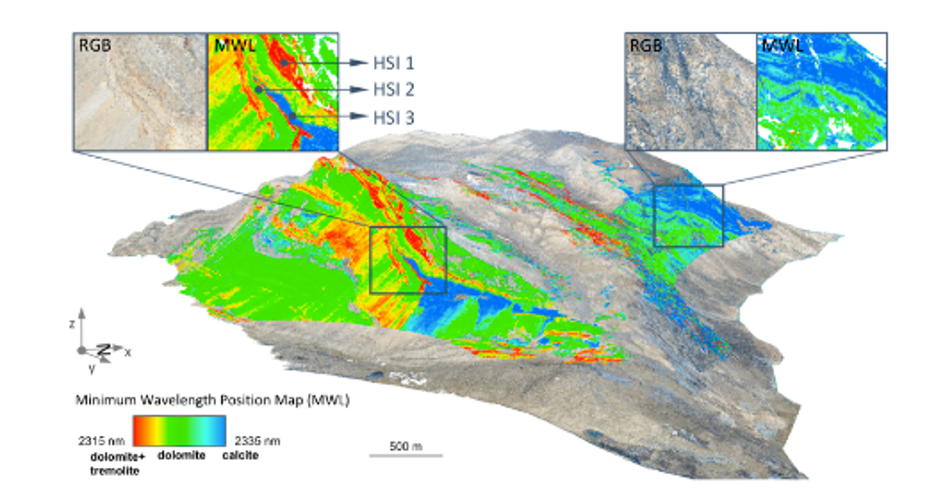
Рисунок 9. 3D-гипероблако двух отдельных сцен ГСИ, наложенных на фотограмметрическое RGB-облако точек мраморных утесов Маарморилик. Картирование по положению минимума поглощения было применено к обоим кубам данных ГСИ для выделения вариаций в составе карбонатов. ГСИ 1, 2 и 3 отмечают точки отбора проб с Рисунка 8.
5.2. Корта Аталая, Риотинто, Испания
Для Корта Аталая три перекрывающихся гиперспектральных скана используются для демонстрации описанного рабочего процесса (Рисунок 1b). Сканы были получены с одной и той же панорамной точки обзора Корта Аталая, но в разное время: Скан 1 был получен в марте 2016 года, а Сканы 2 и 3 - в октябре 2016 года. Расстояние между сенсором и объектом колеблется в широких пределах от 400 до 1100 м. Условия в оба дня съемки были сухими и солнечными, с очень хорошим и постоянным освещением снимаемой стенки карьера. Несмотря на меньшее расстояние до объекта по сравнению с тестовым участком Нуннгарут и средиземноморские климатические условия, т.е. с жарким и сухим летом, в данных изображений наблюдались отчетливые атмосферные абсорбционные признаки.
Все сканы были подвергнуты атмосферной коррекции и геометрически исправлены с использованием фотограмметрического облака точек. Топографическая коррекция была опробована, но в итоге сочтена ненужной, потому что геологически наиболее интересная северная и восточная часть обнажения равномерно освещены, а затененная южная стена карьера не содержит достаточной спектральной информации. После предварительной обработки и коррекции сцен на всех трех сценах было проведено картирование по положению минимума поглощения признака AIOH между 2190 и 2215 нм , чтобы в качестве примера показать возможность использования скорректированных наборов данных для картирования изменений. Впоследствии созданные гипероблака показывают большое совпадение в картированных зонах изменений и могут быть легко объединены в одну итоговую карту AIOH гипероблака (Рисунок 10).
Спектральная валидация результата картирования была проведена с использованием набора полевых спектрометрических данных, полученных in situ. Из-за ограниченной доступности карьера спектральные измерения ограничены несколькими уровнями уступов. Тем не менее, удалось охватить широкий спектр литологий и сравнить с соответствующим спектром пикселя ГСИ. Выборка показана на Рисунке 11а и доказывает сходство спектральной формы и наличие спектральных признаков между изображением и полевыми спектрами. Данная плотность полевых образцов позволяет также подтвердить распределение положения MWL для AIOH. На Рисунке 11b положение признака AIOH для каждого измерения полевым спектрометром в пределах основной интересующей области отображается в виде цветных квадратов с использованием той же цветовой шкалы, что и для нижележащего результата картирования ГСИ.
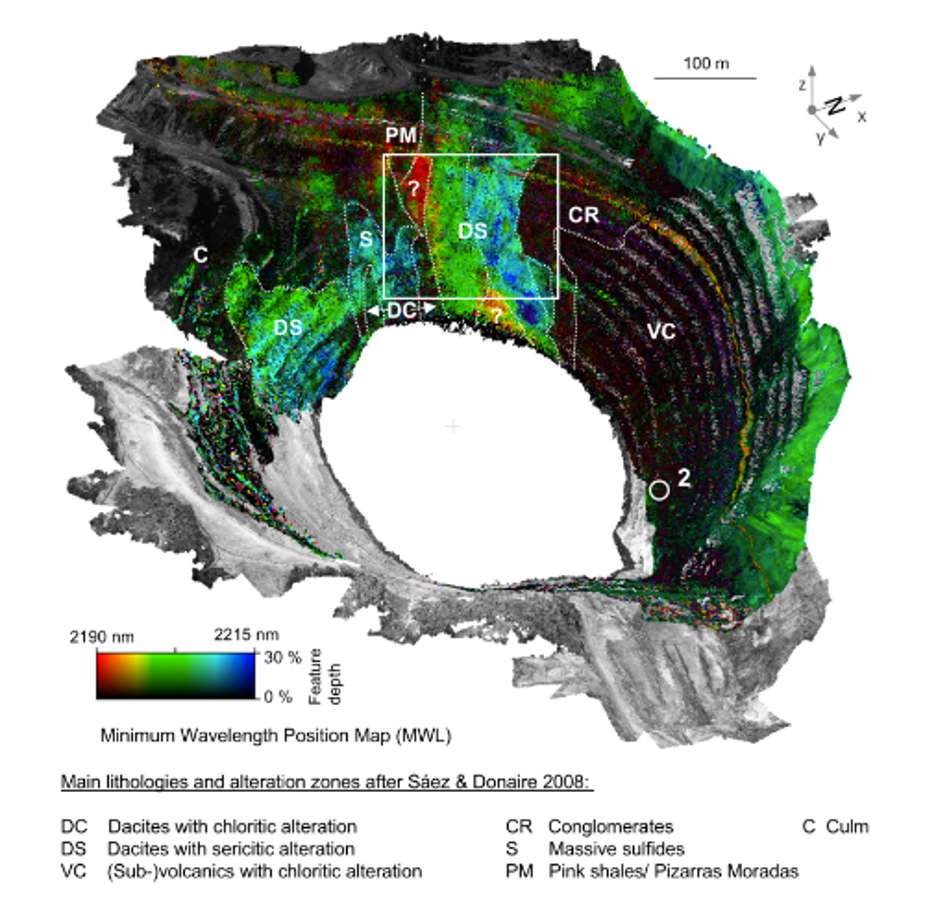
Рисунок 10. 3D-отображение гипероблака трех отдельных сцен ГСИ, наложенных на фотограмметрическое RGB-облако точек открытого карьера Корта Аталая. Все три сцены были использованы для картирования по положению минимума поглощения, чтобы выделить литологические вариации, связанные с различиями в содержании минералов, несущих AIOH. Белый прямоугольник отмечает область, показанную на Рисунке 11. Цветовые различия в гипероблаке MWL отлично коррелируют с известными основными литологиями и зонами изменений [28]. Зоны, не описанные в [28], отмечены вопросительными знаками. Местоположения образцов для Рисунка 11b отмечены белыми кружками и номерами.
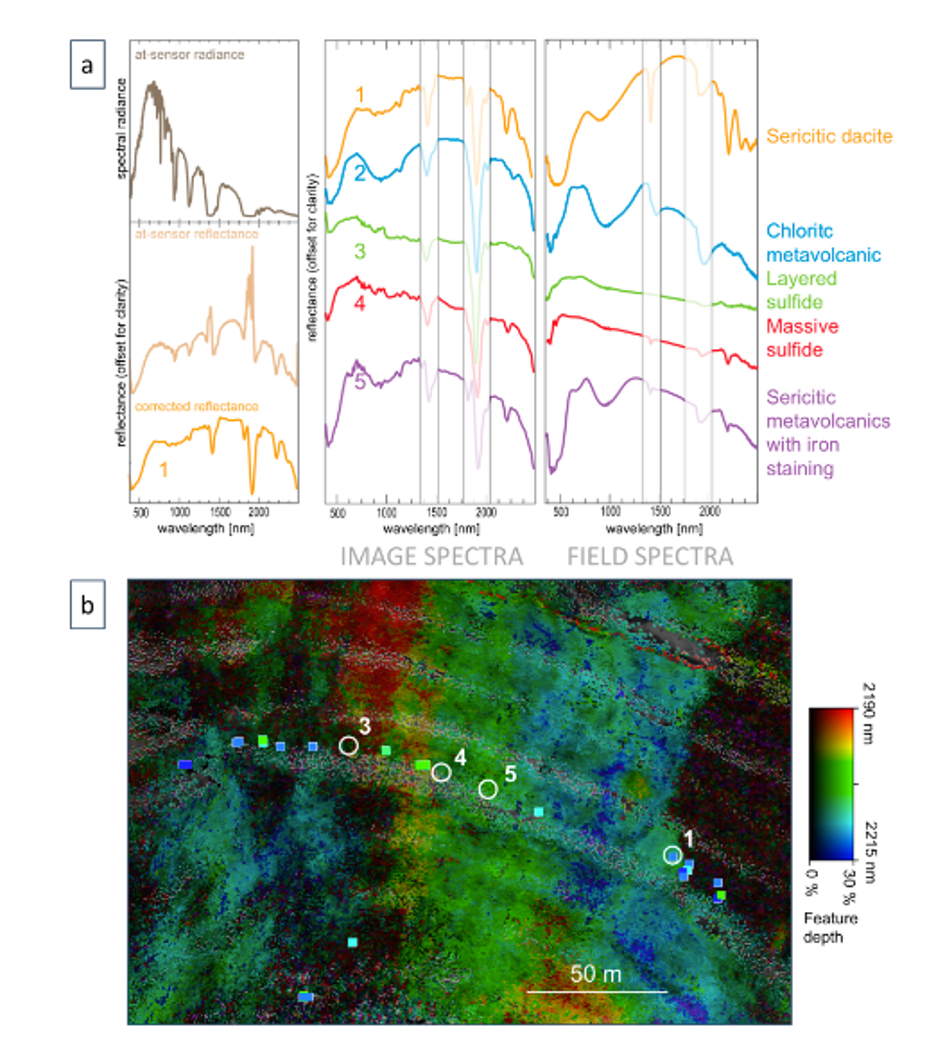
Рисунок 11. Валидация данных ГСИ открытого карьера Корта Аталая. (a) Слева: Улучшение спектральной сигнатуры Точки отбора проб 1 на разных этапах обработки. Справа: Сравнение спектральной формы между полевыми спектрами и спектрами изображения примерно того же местоположения. Местоположения образцов отмечены белыми кружками и номерами на Рисунках 10 и 11b; (b) Сравнение положения признака: карта минимума длины волны для AIOH (см. границы карты на Рисунке 10) и положение признака полевых спектров (цветные квадраты; та же цветовая схема).</center>
6. Обсуждение
6.1. Радиометрическая и атмосферная коррекция
Оба тестовых сценария содержат спектральные искажения из-за атмосферных абсорбционных признаков. На участке Корта Аталая/Испания большинство наблюдаемых атмосферных абсорбционных признаков могут происходить как от восходящего водяного пара из карьерного озера, так и от пыли и частиц, вызванных близлежащими горными работами на соседнем открытом карьере Серро-Колорадо. Это предположение подтверждается распределением атмосферно-искаженных пикселей изображения, которые не связаны напрямую с расстоянием до объекта и сенсора, а в основном встречаются в областях, где сигналу нужно было проходить над водной поверхностью в горном карьере. Напротив, для участка в Гренландии интенсивность атмосферных поглощений была примерно пропорциональна расстоянию между сенсором и объектом. Здесь можно предположить вклад как общей влажности воздуха, так и восходящего водяного пара из фьордов, отделяющих полуостров Нуннгарут от соответствующих точек наблюдения на соседних утесах. Общее атмосферное влияние на сигнал было намного выше, чем в Корта Аталая, что может быть связано как с явно увеличенным расстоянием до объекта, так и с generally более высокой влажностью воздуха арктического климата. Описанный новый рабочий процесс атмосферной коррекции учитывает эту изменчивость в составе атмосферного слоя между сенсором и объектом путем извлечения формы корректирующей кривой непосредственно из сцены и определения интенсивности коррекции в соответствии со специфической для пикселя глубиной атмосферного поглощения, а не расстоянием до объекта.
Для всех пяти обработанных наборов данных подход атмосферной коррекции был быстрым и надежным. Атмосферные поглощения были удалены, в то время как общая спектральная форма и более мелкие признаки, связанные с минералами, были сохранены. Было показано, что подход коррекции учитывает все обильные атмосферные компоненты, которые вносят вклад в извлекаемый повсеместный сигнал и которые мы приписываем атмосферным возмущениям. Помимо водяного пара, это может включать любые распространенные атмосферные газы (такие как СО2 или О3)
и незначительные или повсеместные количества атмосферной пыли, которые имеют значительные спектральные абсорбционные признаки в ВНК и КВК. Только в редком случае экстремального количества локально концентрированной атмосферной пыли или газа, например, из-за взрывных работ или выброса отходящих газов на руднике, атмосферная коррекция может оказаться неудачной для пораженного региона изображения. В этом случае локальные атмосферные возмущения будут явно отклоняться от используемого корректирующего спектра и вызовут неудовлетворительный спектральный результат. Однако таких сценариев можно легко избежать путем соответствующего выбора времени съемки изображения, например, до запланированных взрывных работ.
Следует отметить, что для сильно искаженных пикселей спектральный шум может оставаться на прежних позициях атмосферного поглощения. Пораженные пиксели в основном происходят от чрезвычайно удаленных объектов. Здесь доля сигнала от цели в спектральном сигнале, принятом сенсором, настолько мала, что удаление атмосферного влияния приводит к чрезвычайно низкому отношению сигнал/шум возвращенного спектра, который поэтому выглядит зашумленным и без особенностей. Это может указывать на верхний предел расстояния для дальнего ГСИ. Однако этот предел находился бы на расстоянии до десяти и более километров, в зависимости от атмосферных условий сцены. На таком расстоянии результирующий размер пикселя на местности был бы в диапазоне нескольких сотен квадратных метров, что ставит под сомнение информативность измерения. В заключение, мы смогли доказать успешное применение представленного подхода атмосферной коррекции в пределах разумного расстояния съемки.
6.2. Топографическая коррекция
Как показано на примере полуострова Нуннгарут на Рисунке 4, топографическая коррекция необходима при определенных обстоятельствах, так как она обеспечивает сопоставимость интенсивностей поглощения между по-разному освещенными частями изображения. Однако, хотя коррекция эффективна для корректировки изменений интенсивности, она не может восстановить спектральные признаки в плохо освещенных областях изображения с сопутствующими низкой интенсивностью сигнала, SNR и детализацией признаков. Поэтому мы рекомендуем маскировку или, по крайней мере, осторожную интерпретацию чрезвычайно плохо освещенных или глубоко затененных частей изображения. Мы также предлагаем оценивать полезность топографической коррекции для каждой снимаемой сцены. Из нашего общего опыта и конкретной работы показанных примеров, природные объекты, такие как горные склоны или утесы, часто имеют более плавный рельеф и, следовательно, более равномерное освещение, чем искусственные обнажения, такие как карьеры и открытые рудники. На природных объектах, с результирующими более плавными переходами между частями изображения с максимальным и минимальным освещением соответственно, топографическая коррекция обычно работает хорошо. Искусственные объекты часто имеют террасированную геометрию и/или неровные края из-за взрывных работ и выемки грунта, что создает большие различия в освещении. Топографическая коррекция не обязательно даст улучшение изображения, так как применяемые коррекции в хорошо освещенных частях незначительны, в то время как коррекция темных частей может быть бесполезной по упомянутым причинам.
Метод c-factor, несмотря на его хорошую производительность для топографической коррекции, необходимо применять осторожно. Из-за поканального расчета поправочного коэффициента с использованием линейной регрессии экстремальные или бесконечные значения в одном или нескольких каналах могут вызвать преувеличение поправочного коэффициента для этих каналов и, в конечном итоге, изменение спектральной формы. Эти пиковые значения могут быть вызваны дефектными пикселями в сенсоре ГСИ, которые из-за щелевого характера камеры образуют линии дефектных пикселей, ограниченные несколькими соседними каналами. Если необходимо применить топографическую коррекцию, коррекция или маскировка этих дефектных линий неизбежно требуется для надежного результата изображения.
6.3. Валидация
Спектральная валидация с использованием полевых спектрометрических данных продемонстрировала большую точность как спектральной формы, так и положения признаков скорректированных спектров изображения. В целом, разница между интерполированной длиной волны минимума полевых спектров и соответствующими библиотечными спектрами для определенного абсорбционного признака была ниже 5 нм
в обоих районах исследований. Это значение представляет собой расстояние дискретизации по спектру для данных КВК и лежит ниже достижимого спектрального разрешения 12 нм
(FWHM). Локально наблюдались более высокие расхождения между некоторыми точками изображения и валидационными спектрами, но это может быть связано с большой разницей в пространственном охвате различных приборов. Данные полевого спектрометра были получены с одного или нескольких пятен размером 8 мм
на одном литологически репрезентативном образце, тогда как соответствующий пиксель ГСИ может легко представлять смесь площади в несколько квадратных метров обнажения, в зависимости от расстояния до сенсора. Локальная изменчивость в степени измененности может влиять на репрезентативность показаний спектрометра и приводить к отклонениям от записанного спектра изображения в том же месте. В дополнение к спектральным вариациям, необходимо принимать во внимание незначительное смещение местоположения показаний спектрометра, которое может быть вызвано ограниченной точностью GPS-позиции образца, которая может достигать 5м.
.
6.4. 3D-интеграция
Потенциал, пространственная точность и возможное применение интеграции ГСИ с фотограмметрическими облаками точек более подробно обсуждаются в Salehi et al. [20]. Текущая статья не только подтверждает успешную 3D-интеграцию для двух дополнительных примеров, но и доказывает способность рабочего процесса интегрировать и объединять гиперспектральные наборы данных с разных местоположений камер и углов обзора, а также разных дат и времени съемки путем устранения эффектов рельефа, различных условий освещения и атмосферных поглощений. Это позволяет использовать гиперспектральные данные по-новому, так как облегчает оценку пространственных связей между гиперспектральными результатами, которые не видны из одной точки наблюдения или не могут быть отображены в одном наборе данных, например, противоположные стороны горы или горного карьера.
7. Выводы
В этой статье мы представляем новый подход к атмосферной и топографической коррекции наземных гиперспектральных изображений дальнего диапазона. Такие коррекции необходимы для получения надежной информации о минеральном составе в геологических приложениях. Общий рабочий процесс частично основан на алгоритмах, разработанных для данных ГСИ с дронов и судов, которые были представлены и использованы в наших предыдущих статьях [7,20], но адаптирован и расширен путем добавления подходов радиометрической и топографической коррекции, чтобы соответствовать особым задачам наземной ГСИ дальнего диапазона.
Наиболее важные результаты этой статьи заключаются в следующем:
- Корректирующий спектр для атмосферной коррекции получается непосредственно из сцены, а интенсивность коррекции определяется в соответствии со специфической для пикселя глубиной атмосферного поглощения. Это позволяет избежать использования моделей переноса излучения или наземных целей.
- Углы падения для топографической коррекции вычисляются с использованием нормалей точек фотограмметрической 3D-модели обнажения. Это позволяет впервые использовать обычные алгоритмы топографической коррекции, такие как использованный метод c-factor, для вертикальных обнажений.
- Создание гипероблака, т.е. геометрически и спектрально точной комбинации фотограмметрического облака точек и куба данных ГСИ, достигается с помощью проективных преобразований фотограмметрической 3D-модели обнажения. Удаление эффектов атмосферы и рельефа позволяет интегрировать результаты гиперспектрального картирования, полученные с разных позиций камеры, дат и, следовательно, при разных условиях освещения.
- Два района исследований с пятью наборами данных ГСИ в целом подтвердили применимость и надежность рабочего процесса в различных сложных условиях измерений, касающихся климата, расстояния, состава атмосферы, геологического разнообразия и целей картирования. Успешное MWL-картирование продемонстрировало как геологическую применимость, так и точность положений и глубин спектрального поглощения.
- Точность и надежность созданных данных и результатов картирования подтверждена полевыми спектрами и минералогическим анализом геологических образцов.
- Представленный рабочий процесс является быстрым и простым и требует лишь минимума входных параметров. Большинство этапов обработки автоматизированы и не требуют или требуют крайне мало ручных действий.
- Рабочий процесс позволяет (i) надежное спектральное картирование вертикальных и совершенно недоступных обнажений; (ii) трехмерную интеграцию множества сканов и других источников данных; и (iii) более высокое спектральное разрешение, диапазон и SNR, чем у большинства данных ГСИ с дронов или самолетов.
Благодаря многообещающему качеству представленных наборов данных, мы настоятельно рекомендуем использовать тщательно обработанные и скорректированные наземные данные ГСИ дальнего диапазона для геологических приложений и предлагаем дальнейшую разработку высокоадаптированных алгоритмов топографической и атмосферной коррекции. В нескольких предстоящих прикладных статьях мы представим и обсудим геологическую интерпретацию данных, скорректированных с помощью представленного рабочего процесса, и их интеграцию с другими типами данных, такими как структурные данные и данные гиперспектральной съемки в длинноволновом инфракрасном диапазоне.
Список литеатуры:
1. Hubbard, B.E.; Crowley, C.K.; Zimbelman, D.R. Comparative alteration mineral mapping using visible to shortwave infrared (0.4–2.4 mm) Hyperion, ALI, and ASTER imagery. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1401–1410.
2. Kruse, F.A. Mineral mapping with AVIRIS and EO-1 Hyperion. In Proceedings of the 12th JPL Airborne Geoscience Workshop; Pasadena, CA, USA, 24–28 January 2003, Jet Propulsion Laboratory: Pasadena, CA, USA, 2003; Volume 41, pp. 149–156.
3. Bedini, E. Mapping lithology of the Sarfartoq carbonatite complex, southern West Greenland, using HyMap imaging spectrometer data. Remote Sens. Environ. 2009, 113, 1208–1219Remote Sens. 2018, 10, 176 22 of 23
4. Laukamp, C.; Cudahy, T.; Thomas, M.; Jones, M.; Cleverley, J.S.; Oliver, N.H. Hydrothermal mineral alteration patterns in the Mount Isa Inlier revealed by airborne hyperspectral data. Aust. J. Earth Sci. 2011, 58, 917–936.
5. Zimmermann, R.; Brandmeier, M.; Andreani, L.; Mhopjeni, K.; Gloaguen, R. Remote Sensing Exploration of Nb-Ta-LREE-Enriched Carbonatite (Epembe/Namibia). Remote Sens. 2016, 8, 620. [
6. Jakob, S.; Gloaguen, R.; Laukamp, C. Remote Sensing-Based Exploration of Structurally-Related Mineralizations around Mount Isa, Queensland, Australia. Remote Sens. 2016, 8, 358.
7. Jakob, S.; Zimmermann, R.; Gloaguen, R. The Need for Accurate Geometric and Radiometric Corrections of Drone-Borne Hyperspectral Data for Mineral Exploration: MEPHySTo—A Toolbox for Pre-Processing Drone-Borne Hyperspectral Data. Remote Sens. 2017, 9, 88.
8. Gao, B.-C.; Heidebrecht, K.B.; Goetz, A.F.H. Derivation of scaled surface reflectances from AVIRIS data. Remote Sens. Environ. 1993, 44, 165–178.
9. Adler-Golden, S.M.; Matthew, W.M.; Bernstein, L.S.; Levine, R.Y.; Berk, A.; Richtsmeier, S.C.; Acharya, P.K.; Anderson, G.P.; Felde, J.W.; Gardner, J.A.; et al. Atmospheric correction for shortwave spectral imagery based on MODTRAN4. In Summaries of the Eighth JPL Airborne Earth Science Workshop; Jet Propulsion Laboratory: Pasadena, CA, USA, 1999; Volume 99–17, pp. 21–29.
10. Richter, R.; Schlaepfer, D. Geo-atmospheric processing of airborne imaging spectrometry data, Part 2: Atmospheric/topographic correction. Int. J. Remote Sens. 2002, 23, 2631–2649.
11. Smith, G.M.; Milton, E.J. The use of the empirical line method to calibrate remotely sensed data to reflectance. Int. J. Remote Sens. 1999, 20, 2653–2662.
12. Roberts, D.A.; Yamaguchi, Y.; Lyon, R. Comparison of various techniques for calibration of AIS data. In Proceedings of the 2nd Airborne Imaging Spectrometer Data Analysis Workshop; Pasadena, CA, USA, 6–8 May 1986; Jet Propulsion Laboratory: Pasadena, CA, USA, 1986; Volume 86–35, pp. 21–30
13. Chavez, P.S. An improved dark-object subtraction technique for atmospheric scattering correction of multispectral data. Remote Sens. Environ. 1988, 24, 459–479.
14. Clark, R.N.; Swayze, G.A.; Livo, K.E.; Kokaly, R.F.; King, T.V.V.; Dalton, J.B.; Vance, J.S.; Rockwell, B.W.; Hoefen, T.; McDougal, R.R. Surface Reflectance Calibration of Terrestrial Imaging Spectroscopy Data: A Tutorial Using AVIRIS. In Proceedings of the 10th Airborne Earth Science Workshop; Jet Propulsion Laboratory: Pasadena, CA, USA, 2002; Volume 02-1.
15. Laliberte, A.S.; Goforth, M.A.; Steele, C.M.; Rango, A. Multispectral remote sensing from unmanned aircraft: Image processing workflows and applications for rangeland environments. Remote Sens. 2011, 3, 2529–2551.
16. Kurz, T.H.; Buckley, S.J.; Howell, J.A. Close-range hyperspectral imaging for geological field studies: Workflow and methods. Int. J. Remote Sens. 2013, 34, 1798–1822.
17. Kurz, T.H.; Buckley, S.J. A review of hyperspectral imaging in close range applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 865–870.
18. Murphy, R.J.; Taylor, Z.; Schneider, S.; Nieto, J. Mapping clay minerals in an open-pit mine using hyperspectral and LiDAR data. Eur. J. Remote Sens. 2015, 48, 511–526.
19. Rosa, D.; Dewolfe, M.; Guarnieri, P.; Kolb, J.; Laflamme, C.; Partin, C.A.; Salehi, S.; Sørensen, E.V.; Thaarup, S.; Thrane, K.; et al. Architecture and Mineral Potential of the Paleoproterozoic Karrat Group, West Greenland: Results of the 2016 Season; GEUS Rapport 2017/5; Geological Survey of Denmark and Greenland: Copenhagen, Denmark, 2017; p. 112.
20. Salehi, S.; Lorenz, S.; Sørensen, E.V.; Zimmermann, R.; Fensholt, R.; Heincke, B.H.; Kirsch, M.; Gloaguen, R. Integration of Vessel-Based Hyperspectral Scanning and 3D-Photogrammetry for Mobile Mapping of Steep Coastal Cliffs in the Arctic. Remote Sens. 2008, 10, 175.
21. Kolb, J.; Keiding, J.K.; Steenfeld, A.; Secher, K.; Keulen, N.; Rosa, D.; Stensgaard, B. M Metallogeny of Greenland. Ore Geol. Rev. 2016, 78, 493–555.
22. Sørensen, L.L.; Stensgaard, B.M.; Thrane, K.; Rosa, D.; Kalvig, P. Sediment-Hosted Zinc Potential in Greenland; GEUS Rapport 2013/56; Geological Survey of Denmark and Greenland: Copenhagen, Denmark, 2013; p. 184
23. Grocott, J.; McCaffrey, K.J.W. Basin evolution and destruction in an Early Proterozoic continental margin: The Rinkian fold–thrust belt of central West Greenland. J. Geol. Soc. 2017, 174, 453–467.
24. Pedersen, F.D. Remobilization of the massive sulfide ore of the Black Angel Mine, central West Greenland. Econ. Geol. 1980, 75, 1022–1041. Remote Sens. 2018, 10, 176 23 of 23
25. Henderson, G.; Pulvertaft, T.C.R. Geological Map of Greenland, 1:100 000. Mârmorilik 71 V.2 Syd, Nûgâtsiaq 71 V.2 Nord, Pangnertôq 72 V.2 Syd. Lithostratigraphy and Structure of a Lower Proterozoic Dome and Nappe Complex; Geological Survey of Greenland: Copenhagen, Denmark, 1987; p. 72.
26. Guarnieri, P.; Partin, C.; Rosa, D. Palaeovalleys at the Basal Unconformity of the Palaeoproterozoic Karrat Group, West Greenland; Geological Survey of Denmark and Greenland Bulletin; Geological Survey of Denmark and Greenland: Copenhagen, Denmark, 2016; pp. 63–66.
27. Rosa, D.; Guarnieri, P.; Hollis, J.; Kolb, J.; Partin, C.A.; Petersen, J.; Sørensen, E.V.; Thomassen, B.; Thomsen, L.; Thrane, K. Architecture and Mineral Potential of the Paleoproterozoic Karrat Group, West Greenland: Results of the 2015 Season; Geological Survey of Denmark and Greenland: Copenhagen, Denmark, 2016; p. 98.
28. Sáez, R.; Donaire, T. Corta atalaya. In Geología de Huelva: Lugares de Interés Geológico; Universidad de Huelva, Facultad de Ciencias Experimentales: Huelva, Spain, 2008; pp. 106–111
29. Soriano, C.; Casas, J. Variscan tectonics in the Iberian Pyrite Belt, South Portuguese Zone. Int. J. Earth Sci. 2002, 91, 882–896.
30. Green, A.A.; Berman, M.; Switzer, P.; Craig, M.D. A transformation for ordering multispectral data in terms of image quality with implications for noise removal. IEEE Trans. Geosci. Remote Sens. 1988, 26, 65–74.
31. Phillips, R.D.; Blinn, C.E.; Watson, L.T.; Wynne, R.H. An Adaptive Noise-Filtering Algorithm for AVIRIS Data with Implications for Classification Accuracy. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3168–3179.
32. Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314.
33. Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellán, A. Image-based surface reconstruction in geomorphometry—Merits, limits and developments. Earth Surf. Dyn. 2016, 4, 359–389
34. Carrivick, J.L.; Smith, M.W.; Quincey, D.J. Structure from Motion in the Geosciences; John Wiley & Sons, Ltd.: Chichester, UK, 2016; ISBN 978-1-118-89581-8.
35. James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66.
36. Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 2, pp. 1150–1157.
37. Muja, M.; Lowe, D. Fast approximate nearest neighbors with automatic algorithm configuration. In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, Lisboa, Portugal, 5–8 February 2009; Volume 1, pp. 1–10.
38. Teillet, P.M.; Guindon, B.; Goodenough, D.G. On the Slope-Aspect Correction of Multispectral Scanner Data. Can. J. Remote Sens. 1982, 8, 84–106.
39. Bakker, W.H.; van Ruitenbeek, F.J.A.; van der Werff, H.M.A. Hyperspectral image mapping by automatic color coding of absorption features. In Proceedings of the 7th EARSEL Workshop of the Special Interest Group in Imaging Spectroscopy, Edinburgh, UK, 11–13 April 2011; pp. 56–57.
40. Van der Meer, F.; Kopaˇcková, V.; Koucká, L.; van der Werff, H.M.A.; van Ruitenbeek, F.J.A.; Bakker, W.H. Wavelength feature mapping as a proxy to mineral chemistry for investigating geologic systems: An example from the Rodalquilar epithermal system. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 237–248.
41. Gaffey, S.J. Reflectance spectroscopy in the visible and near-infrared (0.35–2.55 µm): Applications in carbonate petrology. Geology 1985, 13, 270–273.
42. Chilingar, G.V. Classification of Limestones and Dolomites on Basis of Ca/Mg Ratio. SEPM J. Sediment. Res. 1957, 27, 187–189.
43. Garde, A.A. The Lower Proterozoic Marmorilik Formation, East of Mârmorilik, West Greenland; Nyt Nordisk
03 марта / 2026